
آیا می دانستید که انتخاب الکتروموتور برای هر پروژه کنترل حرکت به سادگی با یک نرم افزار قابل انجام است؟
تعیین پارامترهای الکتروموتورها برای رسیدن به هدف پروژه اولین گام اصلی در شروع پروژه است.
در این مقاله شما با استفاده از اطلاعات پایه در زمینه سرو موتور (Servo) و استپر (Stepper) می توانید الکتروموتور مورد نظر خود را انتخاب کنید.
1# پارامترهای موثر در انتخاب الکتروموتور
در این جا مطالبی درباره انتخاب الکتروموتور بر اساس بار، سرعت، شتاب و سایر موارد مورد نیاز بر اساس کاربردی که مد نظر شماست، آموزش داده می شود.
این مقاله به شما کمک می کند که واحدهای اندازه گیری و روش های انتخاب الکتروموتور بهینه را بشناسید.
برای درک بهتر و آشنایی بیشتر با فرآیند انتخاب الکتروموتور باید محاسباتی انجام شود و
همچنین واحد های اندازه گیری که در معادلات استفاده می شوند، مشخص شوند.
بعضی از دانشجویان از اینکه محاسبات را به صورت دستی (manually) انجام دهند لذت می برند؛
اما برخی دیگر ترجیح می دهند که از یکی از هزاران نرم افزار آنلاین که تمام خصوصیات مورد نیاز الکتروموتور را دارد، استفاده کنند و سریع تر فرآیند انتخاب الکتروموتور را انجام دهند.

هدف نهایی این مطلب این است که شما دانشی درباره به دست آوردن موارد زیر از الکتروموتورها داشته باشید:
- سرعت ماکزیمم (بیشینه)
- گشتاور بار (torque load)
- ممان اینرسی (moment of inertia)
در ابتدا چند مسئله کلیدی و مهم و همچنین واحد های اندازه گیری که برای انتخاب الکتروموتور مدنظر شما استفاده می شود، را بیان می کنیم:
1-1# ممان اینرسی
سازندگان الکتروموتورها باید بدانند که نیروی لازم برای حرکت دادن هر باری چقدر است.
به نیروی لازم برای غلبه بر مقاومت بارها، ممان اینرسی می گویند.
ممان اینرسی مقدار مقاومت فیزیکی یک جسم در برابر شتاب زاویه ای را نشان می دهد.
نقش ممان اینرسی در حرکت چرخشی مثل نقش جرم در حرکت خطی است.
برای مثال وقتی در حال سفر با قطار یا هر وسیله نقلیه دیگری هستید، آیا متوجه می شوید زمانی که وسیله نقلیه ترمز می کند شما همچنان به سمت جلو حرکت می کنید؟
خب پس شما دقیقا اینرسی را تجربه کرده اید.
به طور کلی ممان اینرسی یک جسم به شکل جسم و توزیع جرم در آن شکل بستگی دارد.
هر چه تجمع مواد (Concentration of Material) دورتر از مرکز جرم (Geometric Mass) شی مورد نظر باشد، ممان اینرسی آن جسم بزرگتر خواهد بود.
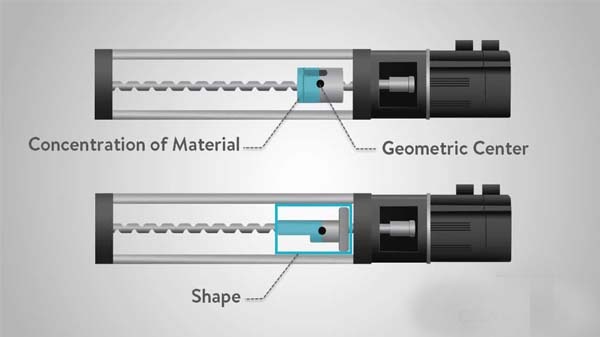
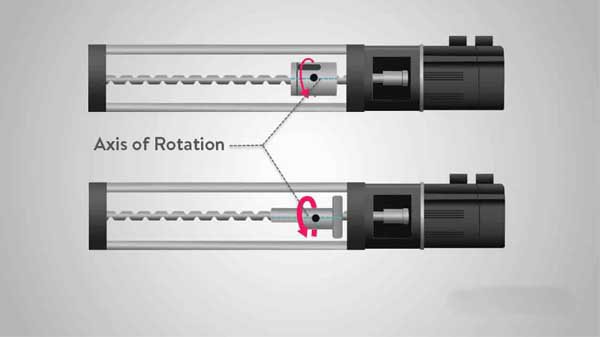
ممان اینرسی وابسته به محورهای چرخشی مشخص، تغییر می کند.
مثال دیگری از ممان اینرسی
برای اینکه مثال دیگری از اینرسی بزنیم، تصور کنید یک تکه یخ بزرگ درون یک حوضچه یخ زده قرار دارد.
نیرویی برای به حرکت درآوردن تکه یخ نیاز است.
هرچقدر جرم یخ بیشتر باشد نیروی بیشتری برای حرکت دادن آن مورد نیاز است.
این مطلب برای زمانی که تکه یخ روی یخ های حوضچه سر می خورد هم صادق است.
تکه یخ به سر خوردن ادامه می دهد تا زمانی که نیرویی آن را متوقف کند.
هرچه تکه یخ سنگین تر باشد نیروی بیشتری برای متوقف کردن آن از حرکت نیاز است.
ممان اینرسی و اینرسی هر دو مقیاسی هستند که مقاومت نسبت به تغییر حالت را نشان می دهند.
جرم درونی (inertial mass) همان نیروی مورد نیاز برای شتاب گرفتن و ممان اینرسی همان گشتاور زاویه ای مورد نیاز برای ایجاد شتاب زاویه ای است.
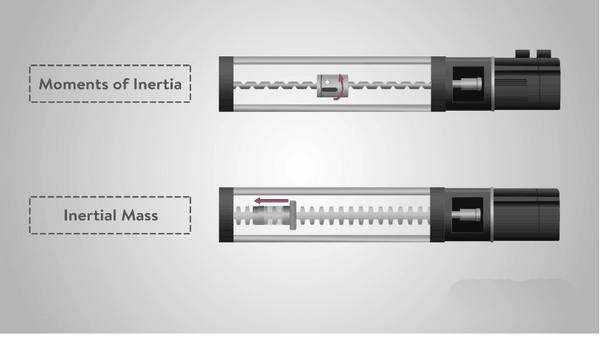
هر چه اینرسی یک جسم بیشتر باشد نیروی بیشتری برای تغییر سرعت در یک زمان مشخص لازم دارد.
واحد ممان اینرسی در سیستم SI، کیلوگرم بر متر مربع (Kg/m2) است.
نماد ممان اینرسی در معادلات معمولا با حرف I نماش داده می شود.
2-1# جرم
در این قسمت می خواهیم چند مثال درباره نحوه محاسبه ممان اینرسی در شکل های مختلف، بیاوریم.
یکی از متغیر ها برای اندازه گیری اینرسی، جرم است.
جرم یک جسم همان مقدار ماده تشکیل دهنده آن جسم است.
یکی از راه های محاسبه جرم این است که شما باید چگالی و حجم باری که در حال حرکت دادن آن هستید را بدانید.
1) چگالی
چگالی در واقع میزان تراکم ماده در یک جسم را نشان می دهد.
هر ماده ای چگالی مخصوص خودش را دارد که می توانید به صورت آنلاین یا با استفاده از کتاب های مرتبط آن را پیدا کنید.
واحد SI چگالی، کیلوگرم بر متر مکعب (Kg/m3) است.

2) حجم
حجم همان محدوده ای است که جسم در فضا اشغال می کند.
حجم یک جسم با واحد متر مکعب (m3) اندازه گیری می شود.
در نهایت می توان جرم یک جسم را با ضرب کردن چگالی (density) در حجم (volume) آن به دست آورد.
متغیر m در نرم افزار نماد جرم است.
جرم یک جسم در واقع نشان دهنده مقدار اینرسی است که جسم از خود نشان می دهد.
خیلی خب، شما تا اینجا بعضی از داده هایی که برای انتخاب الکتروموتور نیاز دارید را یاد گرفتید.
در قسمت بعد راجع به نرم افزار انتخاب الکتروموتور بیشتر صحبت می کنیم.
2# نرم افزار مورد استفاده در انتخاب الکتروموتور
نرم افزار سایزینگ موتور (motor sizing) که در این مقاله استفاده می شود می تواند به ما در انتخاب الکتروموتور کمک کند.
سازندگان این نرم افزارها هم چنین ابزار دیگری برای کمک به ما فراهم کردند تا
بتوانیم محاسبات ممان اینرسی و اندازه گیری جرم را نیز انجام دهیم.
خب حالا بیایید مراحل انتخاب الکتروموتور را شروع کنیم.
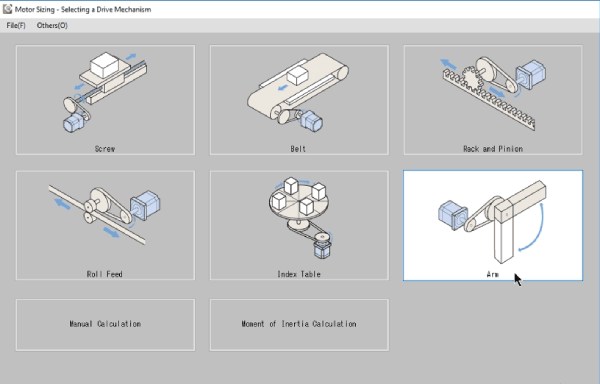
بسیاری از نرم افزارها گزینه های مختلفی برای موارد زیر ارائه می دهند:
- پیچ (screw)
- تسمه (belt)
- چرخ دنده (rack and pinion)
- roll feed
- جدول شاخص (index table)
- کنترل بازوی محرک (Arm movement control)
برای این هدف ما موارد مورد نیاز برای کنترل چرخش بازوی مکانیزم (arm mechanism) را انتخاب می کنیم.
3# تعیین گشتاور بار
در مرحله بعد نیاز دارید که گشتاور مورد نیاز برای کاربرد های حرکتی را محاسبه کنید.
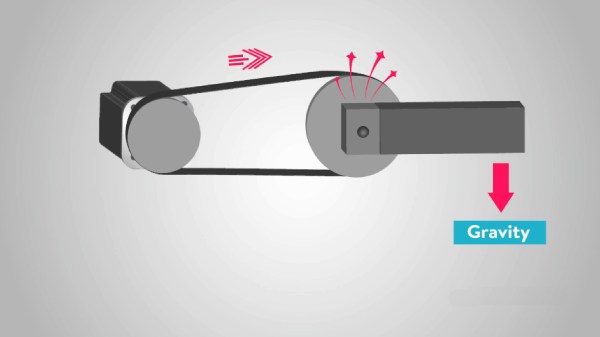
گشتاور میزان نیرویی است که برای چرخش یک مکانیزم استفاده می شود و از سه منبع متفاوت تامین می شود:
- شتاب اینرسی مکانیزم (Accelerating the mechanism’s inertia)
- اصطکاک (Friction)
- نیروهای خارجی مانند نیروی جاذبه یا فشار در مقابل یک شی
سخت ترین قسمت، محاسبه دقیق اینرسی هر جز از سیستم و افزودن مقادیر آن است.
فرمول محاسبه ممان اینرسی برای شکل های مختلف از طریق اینترنت در دسترس است.
4# مراحل محاسبه ممان اینرسی
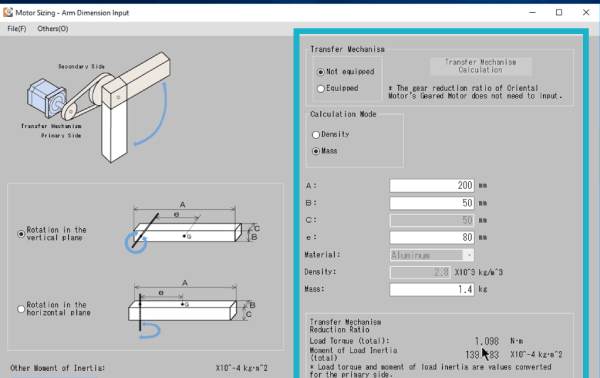
در نمونه برنامه، ما ممان اینرسی را با تکمیل سوالاتی درباره چرخش بازو در صفحه عمودی مشخص خواهیم کرد و
ابعاد بازو (arm) را به صورت زیر مشخص می کنیم:
- A برابر با 200 میلی متر (mm) طول
- B و C برابر با 50 میلی متر که به ترتیب عرض و ارتفاع را نشان می دهند
ما در این قسمت از جعبه دنده (gearbox) برای کاهش سرعت و کنترل گشتاور استفاده نخواهیم کرد.
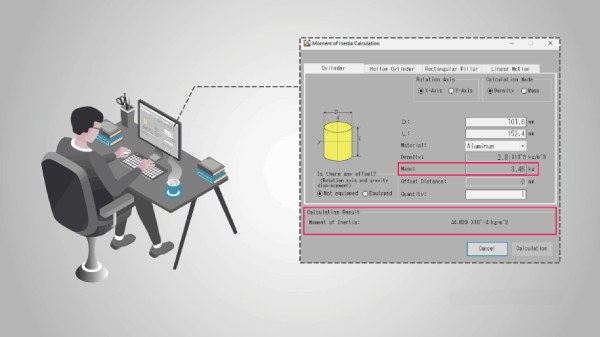
چگالی ماده بر اساس آلومینیوم به دست خواهد آمد که توسط نرم افزار محاسبه می شود.
شما هم چنین می توانید حالت (mode) محاسباتی نرم افزار را به جرم تغییر دهید و
به جای چگالی جرم را با واحد کیلوگرم (Kg) وارد نرم افزار کنید.
ما برای این مثال داده ورودی به نرم افزار را 1.4 کیلوگرم در نظر گرفتیم.
برنامه های آنلاین مختلفی وجود دارند که می توان برای محاسبه جرم یک جسم از آن ها استفاده کرد.
کار نرم افزار این است که شتاب را در بار اینرسی ضرب کند تا شتاب گشتاور بار را محاسبه کند.
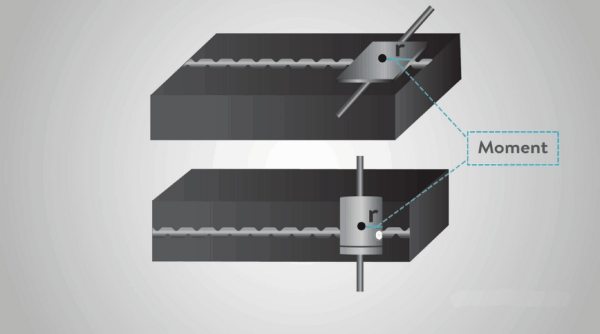
نرم افزار هم چنین نیروهای اصطکاک لازم برای سر خوردن بار، نیروهای گرانشی برای بارهای عمودی و هر نیروی خارجی را محاسبه می کند.
سپس هر نیرو در فاصله مربوط به خودش ضرب می شود که حاصل این ضرب همان ممان است.
5# محاسبه گشتاور موتور
نرم افزار از ممان اینرسی به دست آمده برای محاسبه گشتاور استفاده می کند.
پس از این، نرم افزار با در نظر گرفتن بدترین حالت ممکن، گشتاور اوج (peak torque) را با جمع تمام مقادیر گشتاور محاسبه می کند.
این موضوع معمولا زمانی که بیشترین شتاب اتفاق بیفتد یا زمانی که بیشترین جرم روی ماشین قرار دارد، اتفاق می افتد.
جمع گشتاور های ناشی از نیروهای خارجی، جاذبه و اصطکاک برای محاسبه گشتاور پیوسته، بدون استفاده از نرم افزار، خسته کننده است.
6# تعیین سرعت موتور
در این قسمت مشخص می کنیم که پروفایل حرکت کاربردی به چه شکل است.
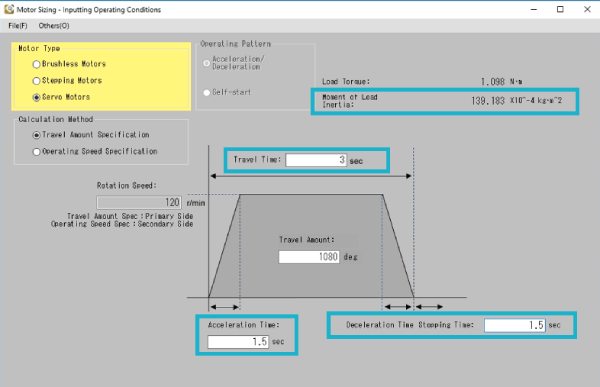
ما از یک موتور سرو و روش محاسباتی مقدار سفر (travel amount calculation method) استفاده خواهیم کرد.
در این مثال ما در حال حاضر از چیزی استفاده می کنیم که به آن پروفایل ذوزنقه ای می گویند.
در این قسمت از نرم افزار، فیلد های مربوط به شتاب مثبت (acceleration) و منفی (deceleration) برابر با 1.5 ثانیه، زمان سفر (travel time) سه ثانیه و مقدار حرکت بر مبنای درجه پر می شود.
ما بازو را سه مرتبه می چرخانیم (360 درجه ضرب در 3 برابر است با 1080 درجه).
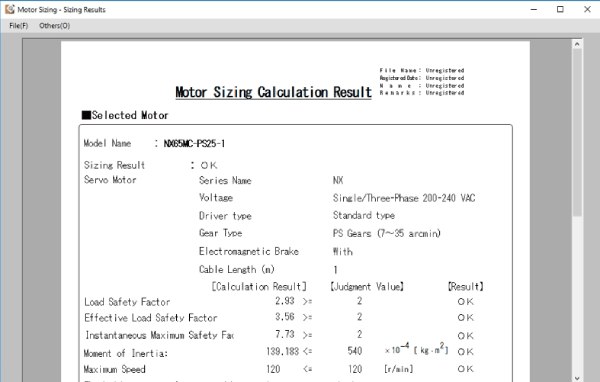
پس ممان اینرسی برابر است با 4-10 * 139.183 کیلوگرم در متر مربع (Kg.m2) که به صورت خودکار محاسبه می شود.
برای تجهیزاتی که عملکرد تکرار شونده دارند، سرعت های مورد نیاز موتور در کل سیکل را رسم کنید.
مطمئن باشید که زمان برای شتاب مثبت و منفی را در نظر گرفته اید.
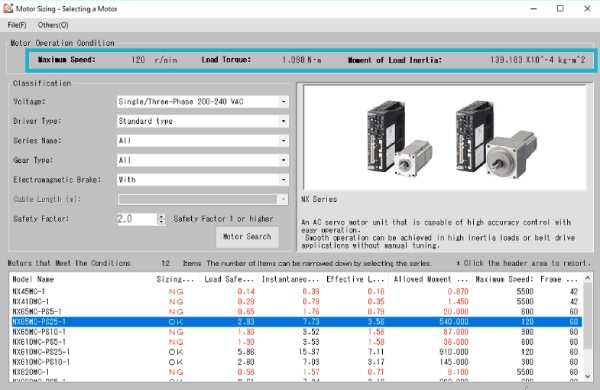
7# شرایط عملیاتی محاسبه شده برای انتخاب الکتروموتور
در قسمت بعد شرایط عملیاتی محاسبه شده برای انتخاب الکتروموتور نشان داده می شود. در این قسمت نرم افزار مقادیر زیر را پیشنهاد می دهد:
- بیشترین سرعت (Maximum speed) برابر 120 دور در دقیقه (r/min)
- گشتاور بار برابر 1.098 نیوتن بر متر (N/m)
- ممان اینرسی برابر 4-10 * 139.183 کیلوگرم در متر مربع (Kg.m2)
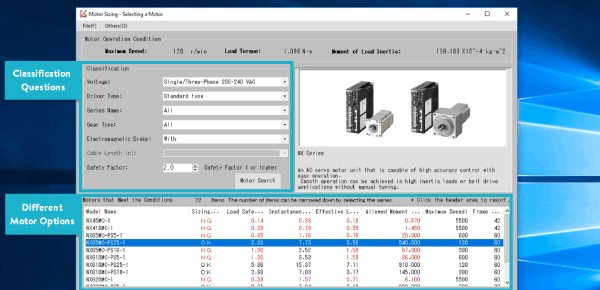
8# ویژگی های اضافه نرم افزار برای انتخاب الکتروموتور
بعضی مواقع سازندگان نرم افزار برای انتخاب الکتروموتور سوالات متفاوت و طبقه بندی شده ای از کاربر می پرسند و
با این کار امکانات اضافه ای برای کاربر فراهم می کنند.
برای مثال اضافه کردن یک ترمز الکترومغناطیسی (electromagnetic brake) می تواند کمک کند که
زمانی که نیرو برداشته شده یا در حال استراحت است، بار در جای خود بماند.
ایده بسیار خوبی است که همیشه فاکتور ایمنی (Safety factor) را در نظر بگیریم تا هر تغییر اضافه در آینده را لحاظ کند و تغییرات بار محاسبه نشود.
در این قسمت شرط کلیدی برای انتخاب الکتروموتور مشخص شده است.
زمان این رسیده است که راهنمای انتخاب محصول سازنده را بررسی کنیم تا موتوری که با این خصوصیات مطابقت دارد را پیدا کنیم.
9# نکته کلیدی در انتخاب الکتروموتور
موتور و درایوی را انتخاب کنید که:
- با ولتاژ ورودی منطبق باشد
- سرعت، گشتاور پیوسته و گشتاور اوجی بیشتر از مقادیر محاسبه شده، داشته باشد
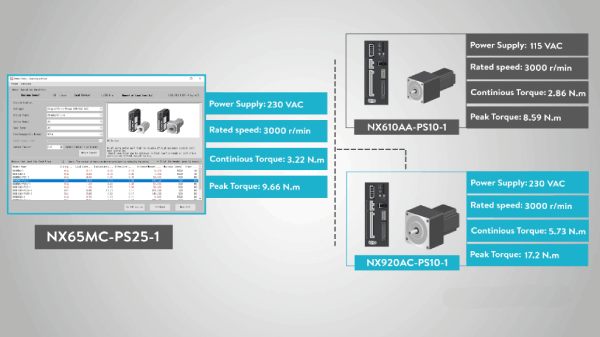
اگر موتوری وجود داشته باشد که به معیار های شما نزدیک باشد در این مرحله کار شما به پایان رسیده است.
در غیر این صورت supplied software gearing می تواند برای انطباق بیشتر بار و موتور استفاده شود.
برنامه به شما این امکان را می دهد که نتایج پروفایل حرکت (motion profile) و تمام محاسبات انجام شده توسط نرم افزار را چاپ کنید.
الکتروموتورها می توانند گشتاور کامل خود را از 0 به هزاران دور در دقیقه (rpm) برسانند.
ماشین های کمی این امکان را دارند که بدون کاهش دنده و در این سرعت ها این کار را انجام دهند.
کاهش دنده با میزان باری که روی سرو قرار دارد، از سه روش زیر هماهنگ می شود:
- کاهش سرعت
- افزایش گشتاور
- کم کردن نسبت اینرسی
سرعت متناسب با نسبت دنده (gear ratio) کاهش می یابد.
گشتاور متناسب با نسبت دنده افزایش می یابد.
از همه مهم تر، نسبت اینرسی متناسب با توان دوم نسبت دنده کم می شود.

10# روشی آسان برای محاسبه گشتاور و اینرسی
سازندگان جعبه دنده، اینرسی جعبه دنده های انواع الکتروموتور را لیست کرده اند.
این موضوع افزودن اینرسی جعبه دنده به محاسبات گشتاور و اینرسی را آسان کرده است.
بسیاری از موتور های در دسترس می توانند سرعت های بالاتری از آنچه لازم است، داشته باشند.
سرعت موتور را به سرعت مورد نیاز تقسیم کنید و
نتیجه را به سمت پایین گرد کنید تا نسبت دنده شروع (gear ratio) را به دست آورید.
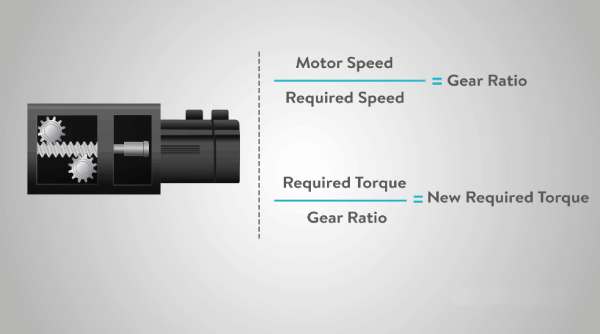
سپس گشتاور مورد نیاز را به نسبت دنده تقسیم کنید تا گشتاور مورد نیاز جدید به دست آید.
این موضوع به شما کمک می کند تا دامنه انتخاب الکتروموتور کاهش یابد و انتخاب الکتروموتور آسان تر شود.
11# تعیین سرو درایو پس از انتخاب الکتروموتور
زمانی که الکتروموتور انتخاب شد،
یک سرو درایو متناسب با ولتاژ ورودی و جریان خروجی کافی برای به حرکت درآوردن سرو موتور انتخاب کنید.
سرو داریو ها می توانند به وسیله رابط های مختلف کنترل شوند.
انواع رابط هایی که می توانید انتخاب کنید شامل موارد زیر است:
- کنترل دیجیتال پالس و جهت (pulse and direction digital control)
- کنترل آنالوگ (analog control)
- سایر شبکه های سرو (servo networks)
سرو درایو راهکار مناسبی برای کنترل سرعت بالا و بازخورد (feedback)، کاهش سیم کشی و قابلیت تشخیص بهتر در مقایسه با سایر رابط ها فراهم می کند.

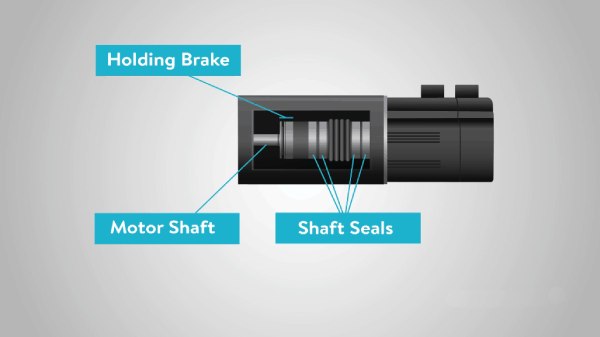
در آخر، هر ویژگی مانند موارد زیر را انتخاب کنید.
- شفت های موتور محرک (keyed motor shaft)
- آب بندی شفت (shaft seals)
- نگه داشتن ترمز برای بار های عمودی
- مقاومت خارجی در برابر ترمز
انتخاب بهترین الکتروموتور برای یک کاربرد خاص توانایی است که با تمرین بهتر می شود.
زمانی که شک دارید، یک راهکار خوب این است که نتایج کارتان را با سازنده یا توزیع کننده الکتروموتورها چک (verify) کنید.
با مطالعه این مطلب حال می دانیم چطور می توان یک الکتروموتور را انتخاب کرد.
امیدواریم هر آنچه برای ایجاد و بهبود پروژه کنترل حرکت خود به آن نیاز داشتید در این پست یاد گرفته باشید.

اگر به دنبال یاد گرفتن مهارت بیشتر و افزایش درآمد هستید،
برای دریافت آموزش های رایگان مرتبط با حوزه علاقهمندی خود فقط کافیه فرم رو تکمیل کنید.
نظرتون درباره این مقاله چیه؟
ما رو راهنمایی کنید تا اون رو کامل تر کنیم و نواقصش رو رفع کنیم.
توی بخش دیدگاه ها منتظر پیشنهادهای فوق العاده شما هستیم.



خیلی هم خوب بسیار هم عالی وسپاس از اطلاعات مفیدتون..
سلام
ممنون از شما و لطفتون.
موفق باشید.
با سلام
ممنون از مطالب آموزندتون.میخواستم ببینم نرم افزار محاسباتی انتخاب موتور رو از کجا میتونم دانلود کنم
با سپاس
سلام
مایه افتخار ماست که این مطلب برای شما مفید بوده.
نرم افزار محاسبات انتخاب موتور الکتریکی رو توی گوگل سرچ بفرمایید، چندین مورد نرم افزار ایرانی هست.
فکر میکنم براتون مفید باشه.
موفق باشید.
ممنون از ایجاد فضا برای آموزش های پر کار برد .
من طراح و سازنده ماشینهای خاص با موتور های هوشمند هستم.
و آموزش شما در فرا گیری مفاهیم مربوط به انتخاب تا حدی کامل بود..
سلام ممنون از لطف شما
باعث افتخار ماست که این مطالب برای دوستان علم جو مفید واقع میشن.