
اغلب تجهیزات برقی ممکن است پس از زمان مشخصی دچار مشکل عملکرد الکتروموتور شوند و
استفاده از روش های حفاظتی از میان یک مرجع حفاظت موتورهای الکتریکی می تواند از آسیب های بعدی جلوگیری کنند.
محفاظت از موتور الکتریکی گاهی تنها با رعایت چند نکته ساده امکانپذیر است.
به طور مثال نباید از یک وسیله به مدت طولانی استفاده کرد، زیرا با روشن ماندن و کارکرد زیاد قطعات دستگاه به ویژه الکتروموتور زیر فشار می روند و
در مدت زمان کوتاهی آسیب می بینند.
هدف از مقاله مرجع حفاظت موتورهای الکتریکی آشنایی کلی با اصول و الزامات حفاظت موتورهای الکتریکی ولتاژ پایین و ولتاژ متوسط است.
با ما همراه باشید.
آنچه در این مقاله خواهید خواند:
- آشنایی با سیستم های ولتاژ ضعیف و ولتاژ متوسط
- عوامل موثر در حفاظت
- انواع حفاظت
- حفاظت موتورهای فشار ضعیف
- حفاظت موتورهای فشار متوسط
1# آشنایی با سیستم های ولتاژ ضعیف و ولتاژ متوسط
مباحث مطرح شده در مرجع حفاظت موتورهای الکتریکی به طور خاص برای موتور های تکفاز و سه فاز ac در نظر گرفته شده است.
در انتخاب نوع حفاظت از موتور باید فاکتورهای زیادی را در نظر گرفت از جمله:
- اهمیت موتور
- مشخصات و اهمیت بار
- درجه بندی موتور (از یک تا چند هزار اسب بخار)
- ظرفیت حرارتی روتور یا استاتور
- محیط
- منبع سیستم قدرت و روش زمین کردن سیستم
- نوع کنترل کننده موتور
- و…
1-1# سیستم های ولتاژ ضعیف
ولتاژ نامی سیستم های ولتاژ پایین (LV) کمتر از 1000 ولت هستند.
جدول زیر درجه بندی موتور LV را برای ولتاژهای مختلف سیستم 60 هرتز نشان می دهد.
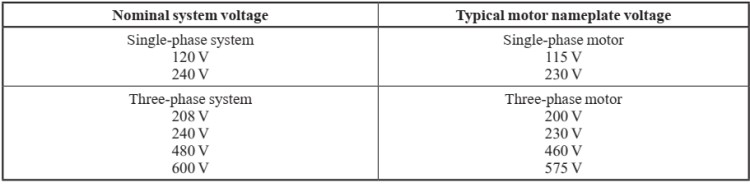
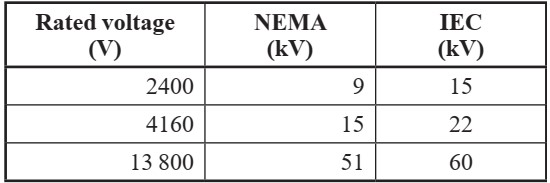
2-1# سیستم های ولتاژ متوسط
دامنه سیستم های ولتاژ متوسط (MV) بالاتر از 1000 ولت و تا 69 کیلو ولت است.
سیستم های قدرت صنعتی و تجاری معمولاً با ولتاژهای توزیع 2.4 کیلو ولت به بالا کار می کنند.
جدول زیر درجه بندی موتور MV معمولی را برای ولتاژهای مختلف سیستم 60 هرتز نشان می دهد.

در بخش بعد از مرجع حفاظت موتورهای الکتریکی عوامل موثر در انتخاب حفاظت مناسب برای موتورهای سیستم های فشار ضعیف و متوسط آشنا خواهیم شد.
2# عوامل موثر در حفاظت موتورهای الکتریکی
در این بخش از مرجع حفاظت موتورهای الکتریکی سعی داریم با عوامل موثر در انتخاب نحوه حفاظت آشنا شویم.
1-2# ویژگی های موتور
مشخصات موتور شامل موارد کلی زیر می شود:
- نوع موتور (به عنوان مثال، القایی یا سنکرون)
- سرعت
- ولتاژ
- درجه بندی قدرت (کیلووات یا اسب بخار)
- ضریب خدمات
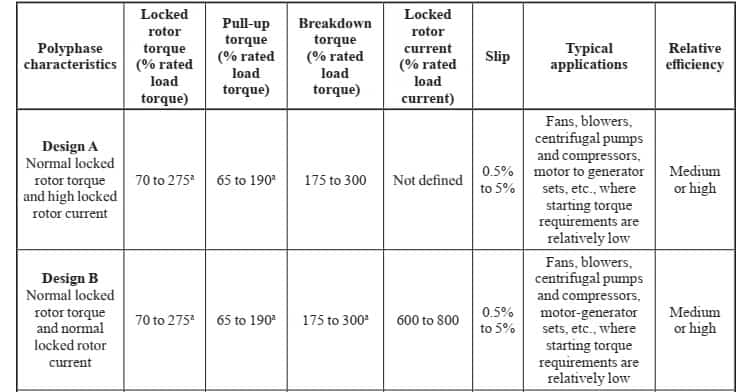
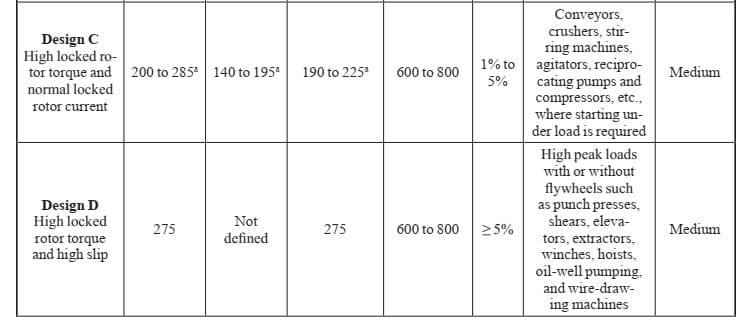
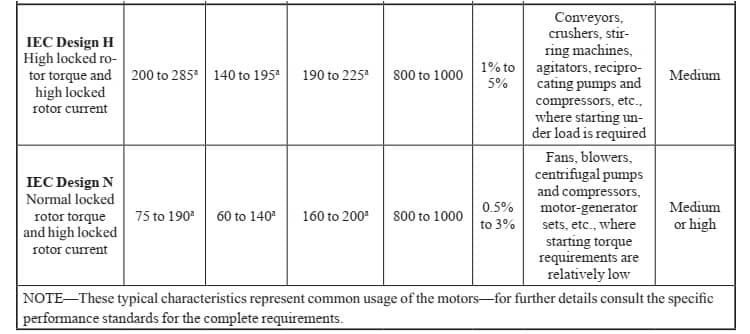
- طراحی NEMA (به عنوان مثال A ،B ،C، یا D که ویژگی های گشتاور و سرعت برای موتورهای LV و MV هستند و در استاندارد NEMA MG 1-2011 شرح داده شده است)
- کاربرد
- درجه بندی ضریب قدرت
- نوع محفظه موتور
- روش روغنکاری بلبرینگ ها
- آرایش سیم پیچ ها و محدودیت های دمایی آن ها
- ظرفیت حرارتی روتور و استاتور طی راه اندازی، کار و توقف
جدول زیر مربوط به ویژگی های موتورهای القایی از استاندارد NEMA MG 10-2010 استخراج شده است.
2-2# شرایط راه اندازی موتور
شرایط راه اندازی موتور به طور کلی شامل موارد زیر می باشد:
- راه اندازی در خط
- ولتاژ کاهش یافته
- درایو سرعت قابل تنظیم (ASD)
- افت ولتاژ
- میزان جریان راه اندازی
- راه اندازی مکرر
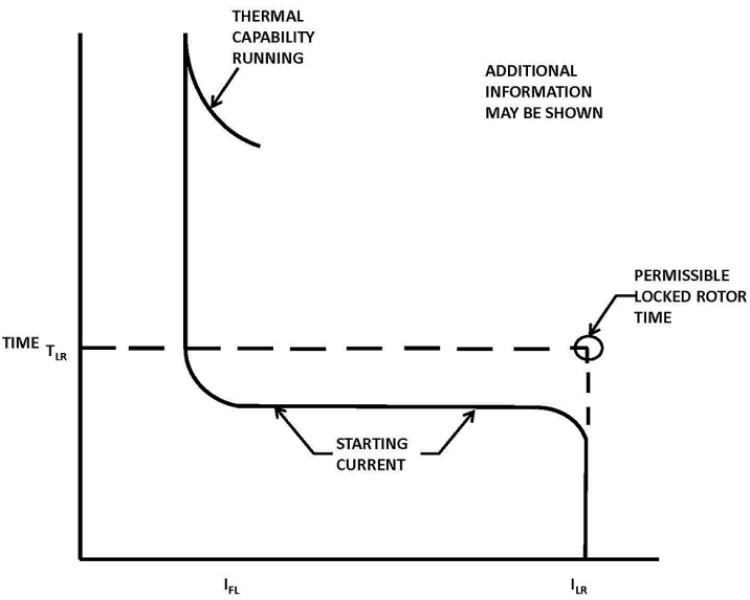
نمودار جریان یک موتور در شکل زیر نشان داده شده است.
روش ها و تنظیمات حفاظت متناسب با روش های راه اندازی انتخاب می شوند.
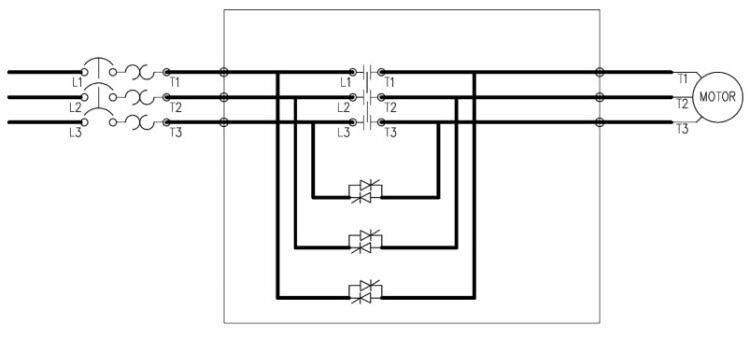
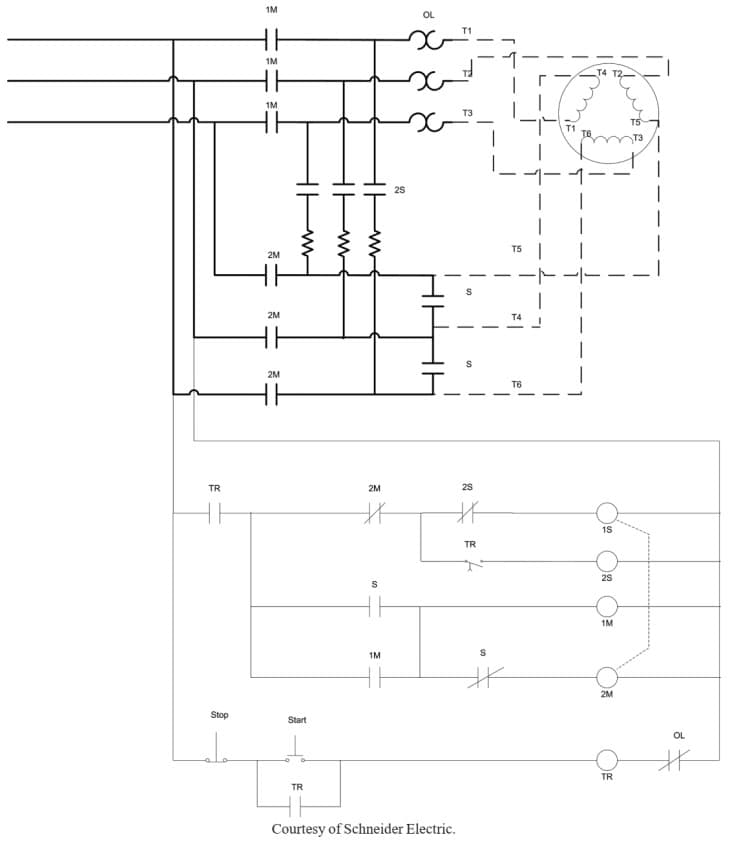
1) راه اندازی موتور ولتاژ کاهش یافته حالت جامد
شکل زیر شماتیک استارت معمولی ولتاژ کاهش یافته حالت جامد با دستگاه کوتاه کننده داخلی را نشان می دهد.
شکل زیر استارت معمولی ولتاژ کاهش یافته حالت جامد با دستگاه کوتاه کننده خارجی را نشان می دهد که
توسط یک رله End of Start کنترل می شود.
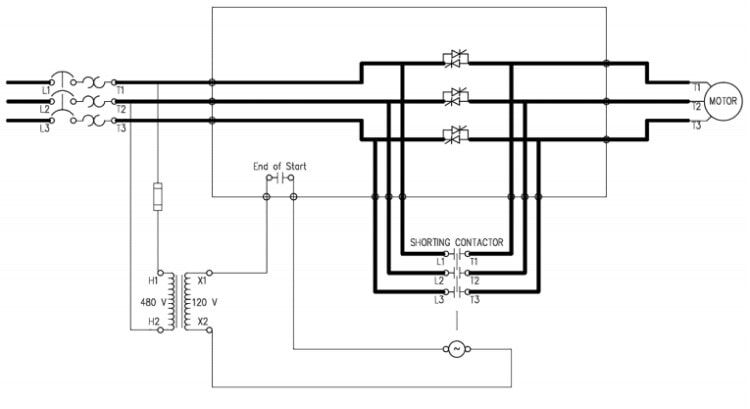
تغییرات در طراحی مدار راه اندازی به شرح زیر است:
- سطح ثابت جریان را حفظ کرده و از افزایش ناگهانی گشتاور موتور می کاهد.
- تریستورها فقط در مرحله استارت استفاده می شوند سپس یک کنتاکتور اتصال کوتاه می شود و
مدار به عنوان یک راه انداز الکترومکانیکی معمولی عمل می کند. - یک استارتر با شتاب خطی نسب به زمان از یک سیستم فیدبک حلقه بسته استفاده می کند تا
شتاب موتور را در یک سطح ثابت حفظ کند.
2) استارت ASD
می توان از ASD به عنوان یک سافت استارتر با ویژگی چندین استارت در ساعت، شتاب قابل تنظیم و گشتاور راه اندازی 100% یا بالاتر استفاده کرد.
3) راه اندازی اتوترانسفورمر
به منظور محدود کردن جریان و گشتاور راه اندازی در موتورهای القایی چند فاز از ترانسفورماتورهای اتوماتیک استفاده می شود که
قابلیت تطبیق منبع تغذیه، جلوگیری از شوک بیش از حد به موتور یا افت ولتاژ بیش از حد دارند.
بدین وسیله حفاظت از اضافه بار و افت ولتاژ نیز تامین خواهد شد و
برای اطمینان از رعایت ترتیب راه اندازی به اینترلاک مکانیکی مجهز هستند.
برای تنظیم گشتاور و جریان راه اندازی، تپ هایی بر روی ترانسفورماتور خودکار تعبیه خواهد شد.
4) راه اندازی راکتور یا مقاومت اولیه
استارت ولتاژ کاهش یافته خودکار برای درایو دنده ای یا تسمه ای طراحی شده است که
در آن باید از اعمال ناگهانی گشتاور ولتاژ کامل خودداری کرد.
جریان هجومی توسط مقدار مقاومت یا راکتور محدود می شود.
گشتاور راه اندازی تابعی از مجذور ولتاژ اعمال شده است.
بنابراین اگر ولتاژ اولیه به 50% کاهش یابد، گشتاور راه اندازی موتور 25% گشتاور شروع ولتاژ کامل آن خواهد بود.
5) راه اندازی تقسیم بندی سیم پیچ
راه اندازی به روش تقسیم بندی سیم پیچ در بارهای کم با اینرسی پایین که سیستم برق نیاز به محدودیت های افزایش جریان دارد استفاده می شوند.
از دو استارت مغناطیسی تشکیل شده است که هرکدام برای یکی از دو سیم پیچ موتور انتخاب می شوند و
یک رله تاخیر زمانی، زمان تغذیه سیم پیچ دوم را کنترل می کند.
محافظت از اضافه بار و افت ولتاژ را فراهم می کند و برای کنترل از راه دور نیز مناسب است.
6) راه اندازی ستاره مثلث (وای-دلتا)
این نوع استارتر در راه اندازی موتورهایی که بارهای با اینرسی بالا با زمان شتاب گیری طولانی دارند بیشترین کاربرد را دارد.
وقتی موتور روی اتصال ستاره (وای) شتاب گرفت، به طور خودکار توسط کنتاکتورها برای کارکرد در حالت مثلث (دلتا) راه اندازی می شود.
همانطور که در شکل زیر نشان داده شده است در انتقال مدار بسته، جریان موتور در توالی استارت قطع نمی شود.
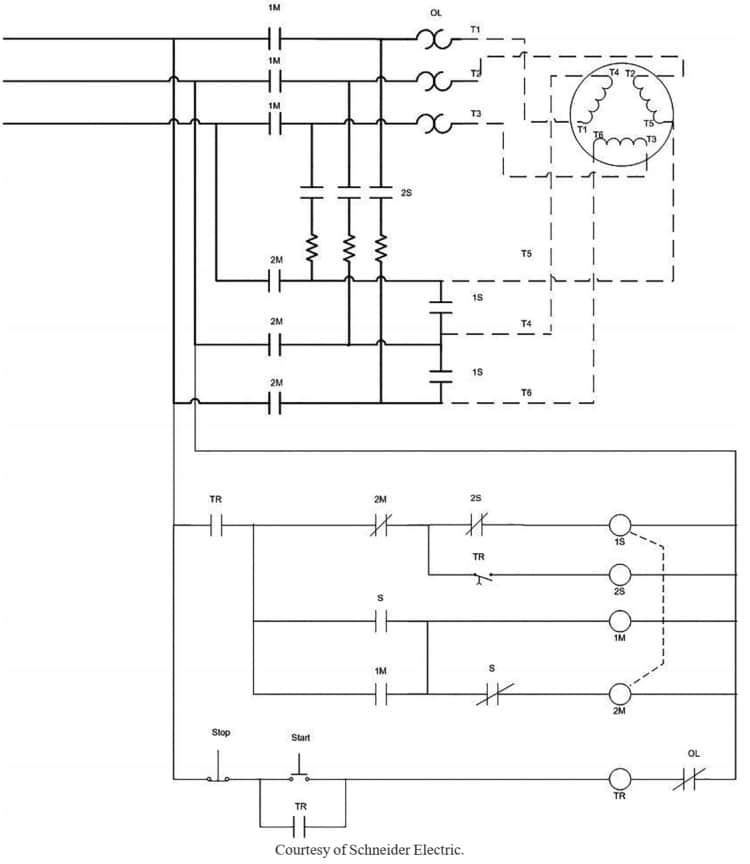
در حالیکه طبق شکل زیر توان در حالت انتقال مدار باز قطع می شود.
7) موتورهای چند سرعته
کنترل کننده های موتورهای قفس سنجابی دو، سه یا چهار سرعته در هر دو نوع قطب متعاقب یا سیم پیچ جدا طراحی شده اند.
این کنترل کننده ها برای موتورهای سه فاز با توان ثابت و گشتاور ثابت یا متغیر استفاده می شوند که در فن ها، دمنده ها، کمپرسورهای برودتی و ماشین آلات مشابه در دسترس هستند.
هنگام کم کردن سرعت موتور باید مراقب بود تا سیم پیچ سرعت کم در حالی که موتور بالاتر از سرعت سنکرون می چرخد تغذیه نشود.
3-2# شرایط محیطی
شرایط محیط شامل حداکثر و حداقل دما، ارتفاع، منابع حرارتی مجاور و چیدمان تهویه است.
حد مجاز افزایش دمای موتور طراحی شده طبق استاندارد NEMA، بر اساس دمای 40 درجه سانتیگراد و حداکثر ارتفاع 1000 متر است.
4-2# تجهیزات درایو
مشخصات بار در حفاظت موتورهای الکتریکی و انتخاب آن ها مهم است.
انتخاب نامناسب تجهیزات درایو ممکن است منجر به موارد زیر شود:
- قفل شدن روتور
- عدم رسیدن به سرعت نرمال (متوقف شدن)
- گرم شدن بیش از حد در هنگام شتاب گیری
- اضافه بار
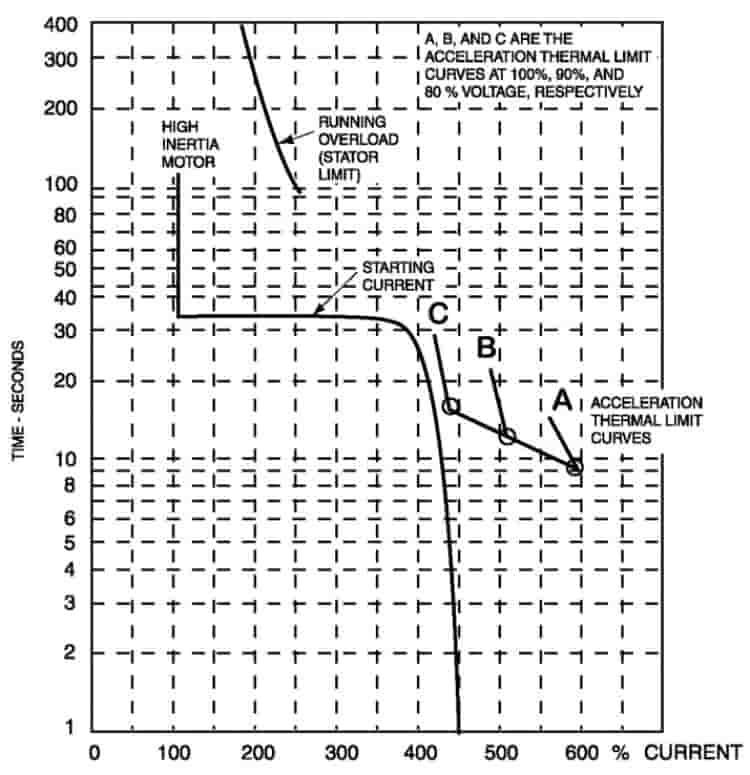
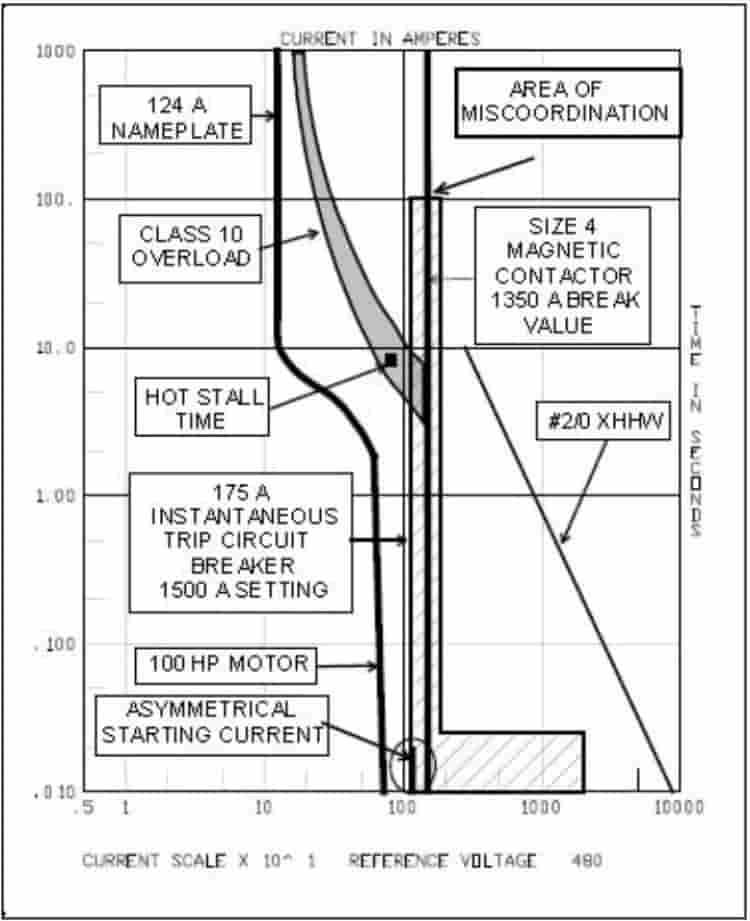
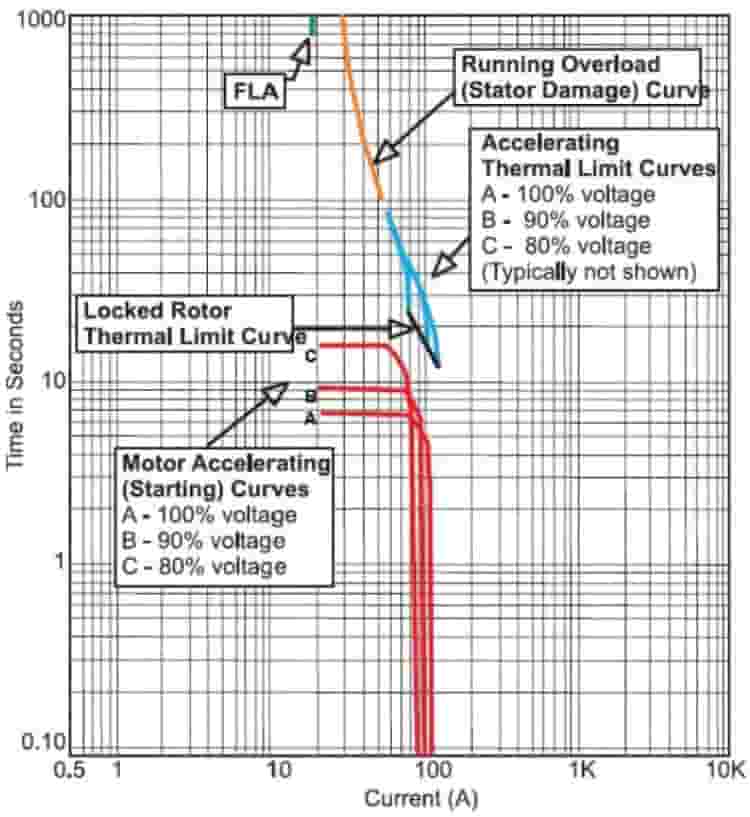
شکل زیر رابطه بین جریان شتاب دهنده موتور و محدودیت های آسیب حرارتی موتور در شرایط شتاب گیری و کار را نشان می دهد.
5-2# کیفیت سیستم قدرت
کیفیت سیستم قدرت شامل موارد کلی زیر می شود:
- انواع زمین کردن سیستم
- قرار گرفتن در معرض صاعقه
- وجود جرقه سوئیچینگ
- خازن ها و کنترل آن ها بر اصلاح ضریب قدرت
- ظرفیت خطا
- قرار گرفتن در معرض انتقال خودکار
- احتمال تک فاز شدن منبع (به عنوان مثال هادی خراب، سوئیچ جدا کننده باز یا قطب دژنکتور، فیوز باز شده و …)
- بارهای دیگر که می توانند باعث عدم تعادل ولتاژ شوند
- هارمونیک (که ممکن است باعث گرم شدن بیش از حد موتور و عملکرد دستگاه های محافظ الکترونیکی شود)
6-2# اهمیت موتور
در مرجع حفاظت موتورهای الکتریکی عواملی که اهمیت موتور را تعیین می کنند به صورت زیر در نظر گرفته شده است:
- قیمت موتور
- هزینه قطع اجباری
- سهولت و هزینه تعمیر یا تعویض
- میزان نیاز به نگهداری و نظارت بر عملکرد ارائه شده
به عنوان مثال، در تاسیسات پردازش، پمپ ها و کمپرسورهای بزرگ بدون ذخیره، از اهمیت بالایی برخوردار هستند زیرا از دست دادن موتور به معنی از کار افتادن سیستم است.
موتوری که برای تداوم کارکرد نیروگاه یا ایمنی فرآیند مهم است باید در اولین مرحله دارای زنگ هشدار قبل از سفر باشد.
7-2# خطای جانبی بار برای کنترل کننده موتور
برای حفاظت مناسب از کنترل کننده موتور، باید از فیوز، دژنکتور یا محافظ مدار موتور برای جریان خطای نامی موجود در ترمینال های خط استفاده شود.
کنترل کننده ذکر شده در NRTL ممکن است به دلیل خطای سمت بار پایین دست کنترل کننده آسیب قابل ملاحظه ای ببیند.
اگر حفاظت برای کاهش آسیب به خود کنترل کننده ضروری باشد، باید با سازنده کنترل کننده مشورت شود یا
حفاظت نوع 2 مطابق با IEC 60947-4-1-2012 مشخص شود.
حفاظت نوع 1 عمده آسیب را کاهش می دهد اما ممکن است بعد از بروز خطا تعویض برخی از اجزای مرکز کنترل موتور لازم باشد.
8-2# خطای زمین
اندازه جریان خطای زمین به نوع سیستم زمین بستگی دارد.
با فرض اینکه زمین دیگری در سیستم وجود نداشته باشد،
با کاهش مقاومت سیستم زمین، سطح آسیب دیدگی موتور از خطای زمین داخلی افزایش می یابد.
مقادیر کم جریان های خطای زمین داخلی باعث ایجاد خسارت در سیم پیچ ها می شود.
در سیستم های زمین کامل، جریان های خطای زمین بالا به سرعت به سیم پیچ ها آسیب شدید می رسانند و
به آهن استاتور و حتی ممکن است به روتور نیز آسیب برساند.
با افزایش سطح جریان خطای زمین و افزایش زمان رفع خطا، هزینه و زمان تعمیر ماشین افزایش می یابد.
9-2# قابلیت نگهداری
قابلیت و برنامه زمانی نگهداری از فاکتور های مهم ذکر شده در مرجع حفاظت موتورهای الکتریکی هستند.
انتخاب محافظ پیچیده ای که قابلیت نگهداری ندارد (یا در آینده نخواهد داشت)، می تواند منجر به محافظت ناکافی شود.
در صورت عدم عملکرد محافظت اولیه، باید از حفاظت پشتیبان استفاده شود.
تنظیمات دستگاه محافظ باید قبل از بازگشت موتور به سرویس تعمیر شده و تأیید شود.
10-2# ضریب خدمات
سرویس فاکتور (SF) موتور ضریبی است که روی توان مجاز اعمال می شود و
نشانگر میزان مجاز بارگیری توان تحت شرایط تعیین شده برای سرویس فاکتور است.
سرویس فاکتور 1 همان پلاک نامی موتور است.
11-2# حفاظت موتورهای الکتریکی و هادی
در حالی که تمرکز بر مرجع حفاظت موتورهای الکتریکی است، می توان ادعا کرد که
دستگاه های محافظت از موتور از هادی های مدار موتور نیز محافظت می کنند.
حفاظت از هادی مدار موتور باید در نمودارهای جریان-زمان لحاظ شود و
با کدها و استانداردهای قابل اجرا برای استاندارد AHJ مطابقت داشته باشد.
اندازه هادی باید برای تأمین ولتاژ کافی برای راه اندازی و کار انتخاب شود.
در هنگام اتصال کوتاه عایق هادی باید یکپارچگی خود را حفظ کند.
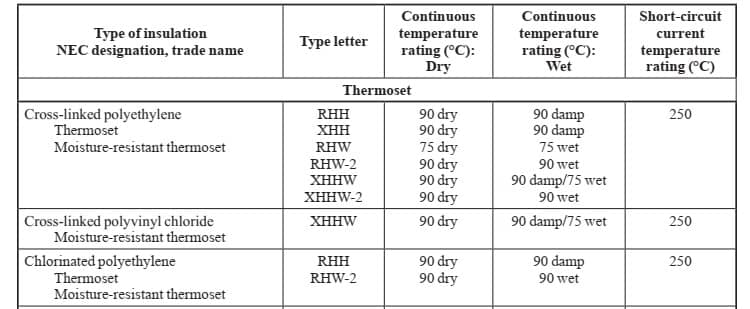
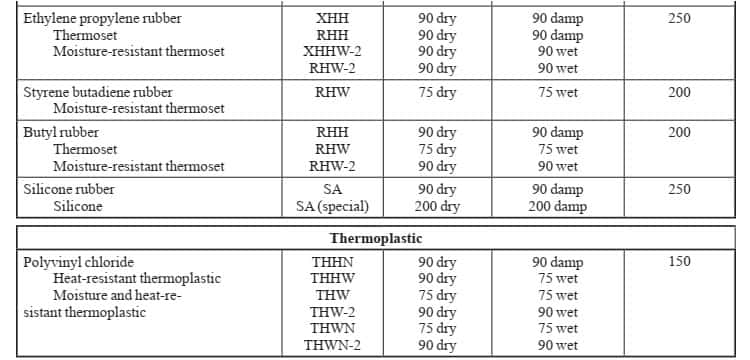
هنگام استفاده از منحنی های آسیب هادی، طراح باید موارد زیر را مورد توجه قرار دهد:
- نوع عایق
- حداکثر درجه حرارت مداوم عایق
- حداکثر درجه حرارت جریان اتصال کوتاه عایق
در زیر نمونه هایی از انواع هادی ها و درجه بندی دما ارائه شده است.
داده های منحنی آسیب هادی از برخی نرم افزارها نیز قابل استخراج است.
12-2# کاربرد های خازن ثابت
کاربردهای خازن اصلاح ضریب قدرت ثابت باید شامل موارد زیر شوند:
- به محل خازن وابسته باشد، نقطه اضافه بار موتور باید تنظیم شده باشد.
- خازن باید ثابت زمانی مدار باز موتور را افزایش دهد تا ولتاژ باقیمانده موتور به یک سطح قابل قبول برسد.
- بسیاری از کارخانه های فرآیند تمایل به اجرای طرح شتاب مجدد موتور دارند.
بنابراین، ممکن است خازن برای موتورهای شتاب مجدد در نیروگاه های فرآیندی مناسب نباشد.
در بخش بعدی مرجع حفاظت موتورهای الکتریکی قصد داریم با انواع حفاظت های مهم مورد آشنا شویم.
3# انواع حفاظت موتورهای الکتریکی
در این بخش از مرجع حفاظت موتورهای الکتریکی انواع روش های حفاظت در برابر خطاهای گفته شده در بخش قبل مورد بررسی قرار می گیرند.
1-3# هدف از حفاظت موتورهای الکتریکی
پیش فرض اساسی سیستم قدرت این است که
توان تحویلی برای تأمین نیازهای تأسیسات از کیفیت قابل قبولی برخوردار باشد.
با این حال به دلیل شرایط مکان یا منبع تغذیه خارجی ممکن شرایط غیر عادی به وجود آید.

دستگاه های محافظ موتور اجازه می دهند تا موتور راه اندازی شود و کار کند و در شرایط زیر مدار موتور را از سیستم قدرت قطع می کند:
- وقتی متوقف می شود
- شتاب نمی گیرد
- جریان بیش از حد را می گیرد
- بیش از حد گرم می شود
- بیش از حد لرزش می کند
تشخیص شرایط نامناسب از طریق اندازه گیری ولتاژ، جریان، دما، فرکانس، هارمونیک، لرزش و در صورت لزوم سرعت انجام می شود.
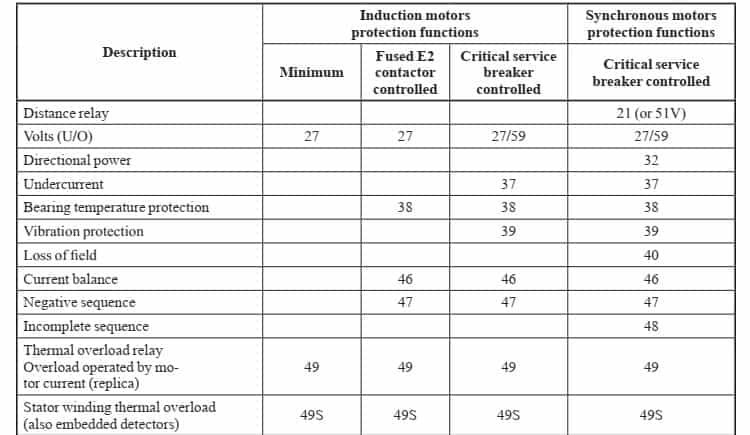
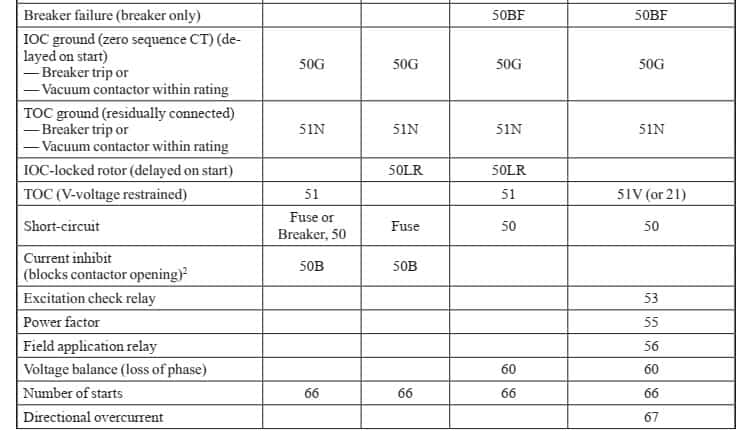
در بحث های مربوط به ابزارهای محافظتی در حفاظت MV، به شماره دستگاه هایی اشاره می شود که
در استاندارد IEEE Std C37.2 شرح داده شده است.
رله های محافظ باید به نحوی طراحی شوند که آزمایش و کالیبراسیون رله ها با استفاده از منبع تغذیه خارجی بدون قطع سیم کشی دائمی میسر شود.
برای کاربردهای مهم هر رله باید دارای CT، VT و سیم کشی برای اتصال ورودی و خروجی دیجیتال رله به سوئیچ تست رله باشد.
2-3# وضعیت غیر عادی منبع تغذیه
حفاظت افت ولتاژ در موارد زیر استفاده می شود:
- جلوگیری از راه اندازی مجدد اتوماتیک موتور هنگام بازگشت ولتاژ پس از قطع
- جلوگیری از هجوم بیش از حد به بار کل موتور به دنبال افت ولتاژ یا بازگشت ولتاژ پس از قطع شدن
- جلوگیری از شتاب گیری مجدد موتور قبل از سقوط میدان
برای جلوگیری از افت ولتاژهای غیرضروری همراه با اتصال کوتاه خارجی در موتورهای با کارکرد مداوم، باید از حفاظت افت ولتاژ با تاخیر زمانی استفاده کرد.
مثال هایی از استارترهای بدون قفل که باید از حفاظت افت ولتاژ آنی استفاده شود:
- استارتر ترکیبی سوئیچ یا دژنکتور با فیوز
- موتورهای سنکرون با استارترهای دارای کنتاکتورهای نگهدارنده مغناطیسی متناوب
- موتورهای القایی با استارترهای دارای کنتاکتورهای نگهدارنده مغناطیسی متناوب
- موتورهای مورد استفاده در سیستم هایی که انتقال اتوماتیک سریع دارند
از آنجا که کنتاکتور اصلی نگهدارنده مغناطیسی ac (که موتور را تغذیه می کند) با قطع تغذیه ac قطع می شود،
حفاظت افت ولتاژ آنی را فراهم می کند اگر به راه اندازی مجدد خودکار نیاز باشد،
دو روش رایج، محافظت افت ولتاژ تاخیر زمانی را به صورت زیر نتیجه خواهند داد:
- ارائه یک زمان بندی (که با ولتاژ AC کم یا صفر شروع به کار می کند) که بازگشت ولتاژ عادی کنتاکتور اصلی را مجدداً ببندد.
طرح های زمان بندی می توانند به شرح زیر باشند:
- استفاده از کنترل دو سیمه
3-3# حفاظت موتورهای الکتریکی در برابر عدم تعادل فاز
در این بخش از مقاله مرجع حفاظت موتورهای الکتریکی 2 نوع مشکلی که ممکن است برای فاز های یک موتور ایجاد شود را بررسی می کنیم.
1) عدم تعادل فاز
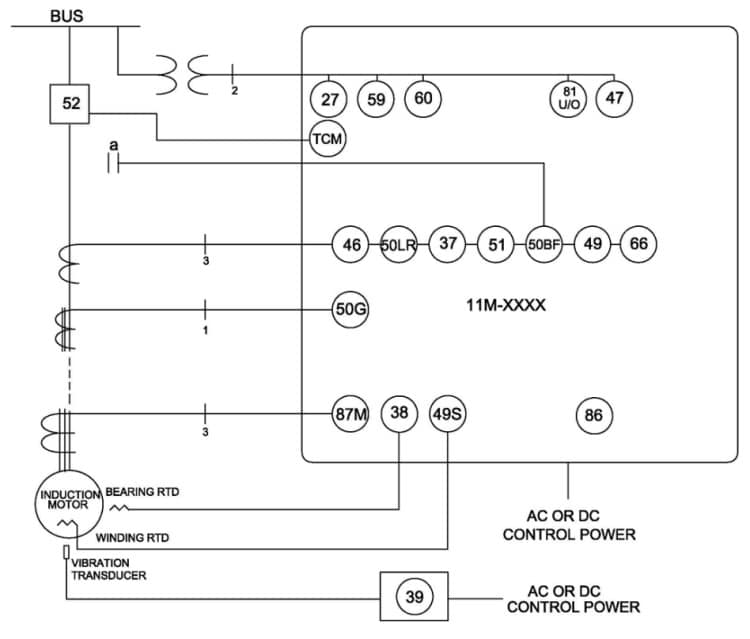
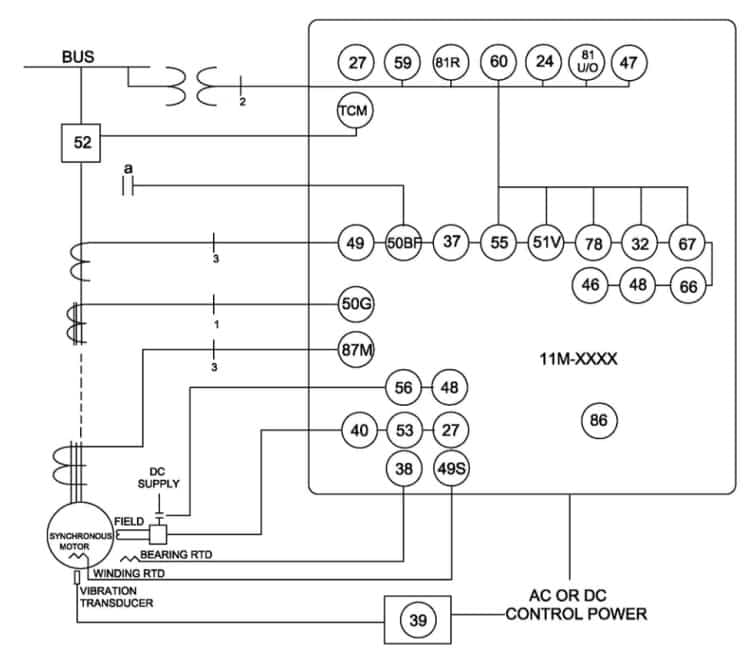
انواع مختلفی از رله ها برای حفاظت از عدم تعادل فاز (مثلا تک فاز شدن) در دسترس هستند.
بیشتر رله های مورد استفاده در زیر دستگاه 11M طبقه بندی می شوند.
بنابراین کاربر باید عملکردهای محافظتی لازم را انتخاب کرده و بقیه را غیرفعال کند.
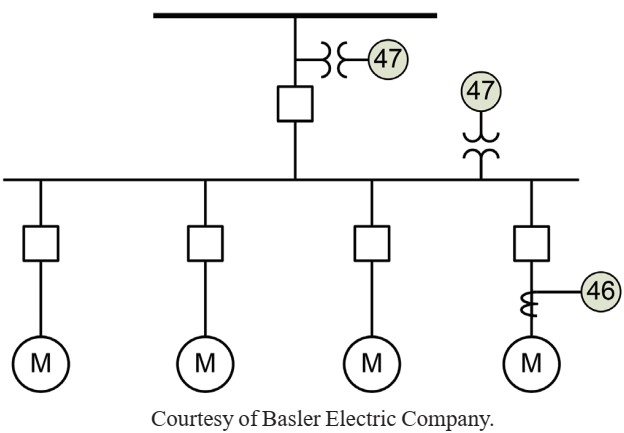
- عدم تعادل جریان فاز (دستگاه 46)
- عدم تعادل جریان فاز در برابر زمین با مقاومت بالا (HRG) (دستگاه 46)
- فاز معکوس (دستگاه 46)
- اضافه جریان توالی منفی (دستگاه 46)
- ولتاژ توالی منفی (دستگاه 47)
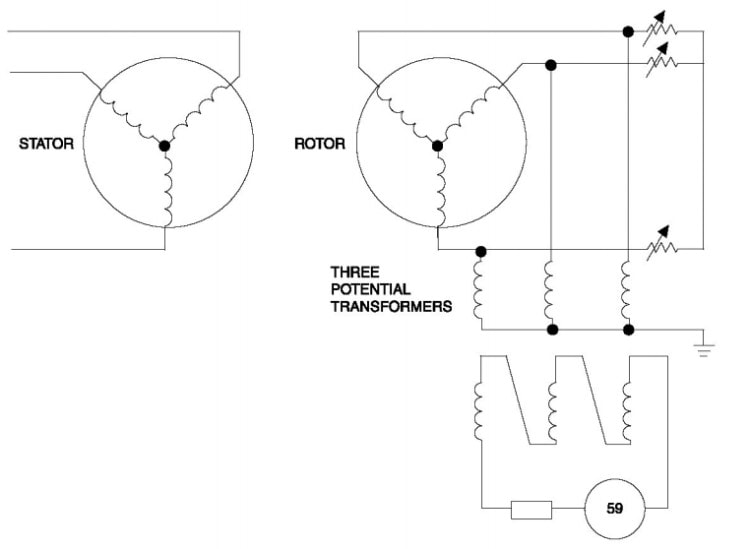
- تعادل ولتاژ (دستگاه 60)
هنگامی که ولتاژهای فاز نامتعادل باشند گرمای بیش از حد موتور رخ می دهد.
عدم تعادل ولتاژ کوچک، جریان توالی منفی زیادی را در هر دو موتور سنکرون و القایی تولید می کند.
امپدانس توالی منفی در واحد موتور تقریباً برابر با تقسیم ولتاژ نامی بر جریان روتور قفل شده است.
وقتی روتور یک موتور قفل شده است، جریانی شش برابر جریان نامی دارد و
دارای امپدانس توالی منفی تقریباً 0.167 در واحد (16.7%) بر پایه کیلو ولت آمپر ورودی موتور است.
وقتی ولتاژهایی با 0.05 واحد مولفه توالی منفی به موتور اعمال می شوند،
جریان های توالی منفی 0.3 واحد به سیم پیچ ها اعمال خواهد شد.
بنابراین، عدم تعادل ولتاژ 5% منجر به تولید جریان توالی منفی 30% جریان بار کامل در استاتور خواهد شد.
این وضعیت می تواند منجر به افزایش 40 تا 50 درصدی دما شود.
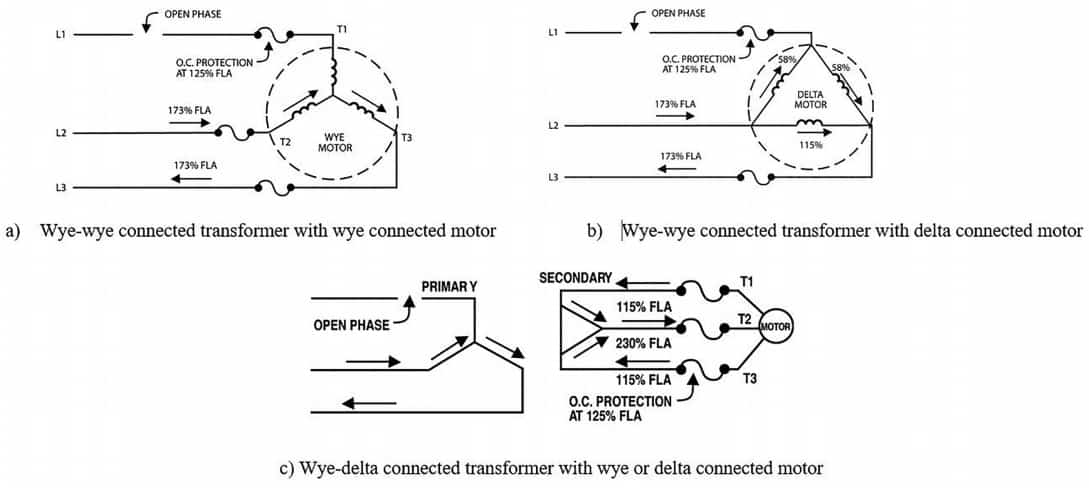
2) تک فاز شدن
شکل شدید عدم تعادل فاز، از دست دادن کامل ولتاژ در یک فاز است.
در این شرایط موتور سه فاز قادر به روشن شدن نیست.
اگر تک فاز در شرایط کار با بار کامل و در حالت ستاره رخ دهد، جریان دو فاز دیگر از جریان بار کامل اتصال ستاره بالاتر خواهد رفت (مطابق شکل زیر (a)).
اگر اتصال موتور مثلث باشد، در سیم پیچی که به دو فاز برقدار متصل است، جریان بیشتر از جریان بار کامل خواهد بود و
دو سیم پیچ دیگر که یک سر مشترکشان به فاز بی برق متصل است، جریانی کمتر از جریان بار کامل دارند (مطابق شکل زیر (b)).
این شکل ها در صورت اتصال ستاره – ستاره ترانسفورماتور قابل اجرا هستند.
اگر ترانسفورماتور ستاره – مثلث متصل باشد، همان مشکل وجود دارد فقط مقادیر فعلی متفاوت هستند (مطابق شکل زیر (c)).
در هر حالت، حافظت اضافه جریان مورد نیاز است.
ولتاژهای نامتعادل با خطاهای نامتعادل سیستم همراه هستند.
بنابراین، حفاظت عدم تعادل فاز باید تأخیر کافی داشته باشد تا
بدون وقفه در کار موتور، سیستم محافظت از اضافه جریان خطاهای خارجی را برطرف کند.
تأخیر از وقفه در راه اندازی موتور جلوگیری می کند.
بنابراین، حفاظت از عدم تعادل با تاخیر ذاتی باید انتخاب شود.
طرح دیگر (پر خطر) استفاده از تایمر کمکی (دستگاه 62) است.
انتخاب آن از اهمیت زیادی برخوردار است زیرا تایمر نسبت به رله محافظ نرخ خطای بالاتری دارد.
4-3# حفاظت موتورهای الکتریکی در برابر اضافه جریان (دستگاه 51، زمان معکوس) (دستگاه 50، لحظه ای)
سنجش اضافه جریان متداول ترین روش برای نظارت و محافظت از بسیاری از مدارهای برق یک مرکز است.
اگرچه ممکن است در درجه بندی ضریب خدمات موتور اضافه بار نیاز به هیچ اقدامی نداشته باشد اما
اگر اتصال کوتاه رخ دهد، عملیات محافظت باید بدون تاخیر آغاز شود.
هر زمان که موتور نتواند با سرعت طراحی شده شتاب بگیرد، وقتی جریان موتور بیش از حد نرمال است و
زمانی که اتصال کوتاه تشخیص داده می شود، محافظت از مدار شاخه موتور انجام می شود.
معمولا دستگاه های اضافه جریانِ زمانی برای محافظت در برابر اضافه بار و شتاب گیری نامناسب استفاده می شوند،
در حالی که دستگاه های لحظه ای (بدون تاخیر) در صورت بروز اتصال کوتاه کار می کنند.
5-3# رله ارت فالت برای حفاظت موتورهای الکتریکی
یک رله کلاسیک برای تشخیص خطای زمین است.
معمولاً برای موتورهای MV، موتورهای بزرگتر از 750 کیلووات یا موتورهای با سیم خنثی استفاده می شود.
روش های مختلف حفاظت از زمین عبارتند از سنجش زمین، سنجش جریان توالی صفر و سنجش جریان باقیمانده در دسترس.
6-3# حفاظت موتورهای الکتریکی در برابر افت تحریک (از بین رفتن فلد) (دستگاه 40)
حفاظت از افت تحریک فقط برای موتورهای سنکرون اعمال می شود.
رله می تواند سیم پیچ فلزی روتور را کنترل کند.
شرایط بدون میدان، شرایط واردات/صادرات VAR یک موتور سنکرون را به وجود می آورد و
رله های چند منظوره (دستگاه 11) VAR را مانیتور می کنند تا این وضعیت را تشخیص دهند.
7-3# حفاظت موتورهای الکتریکی اضافه تحریک (ولت / هرتز) (دستگاه 24)
حفاظت اضافه تحریک (دستگاه 24) نیز برای موتورهای سنکرون اعمال می شود و
سیم پیچ روتور را مانیتور می کند.
این حفاظت همچنین در موتورهای القایی در سرویس های حساس، موتورهایی با منبع تغذیه محلی، موتورهایی با منبع تغذیه منفرد و سایر مکان های مشابه اعمال می شود.
8-3# رله محافظ بلبرینگ (دستگاه 38)
یک رله محافظ بلبرینگ دمای بلبرینگ را مانیتور کرده و
وقتی دمای کار به نقطه تنظیم شده برسد موتور را متوقف می کند.
در بسیاری از موارد، دمای هشدار بلبرینگ 90 درجه سانتیگراد تنظیم شده است اما دمای توقف موتور 100 درجه سانتیگراد است.
در صورت استفاده از روان کننده تنظیمات بالا 30 درجه افزایش خواهد یافت.
9-3# رله حفاظت موتورهای الکتریکی شرایط مکانیکی (دستگاه 39)
این رله وقوع شرایط مکانیکی غیر عادی مانند لرزش، گریز از مرکز، انبساط، شوک، کج شدن و یا خرابی مهر و موم را تشخیص می دهد و
از حسگرهای مختلفی برای ارسال سیگنال به رله های محافظ استفاده می کند.
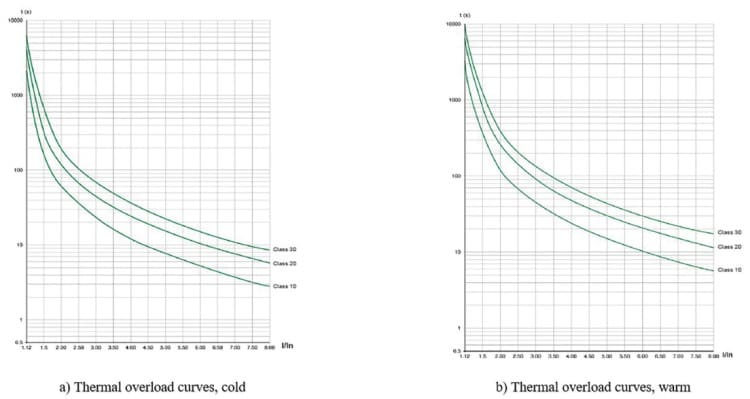
10-3# حفاظت اضافه بار الکترونیکی و حرارتی (دستگاه 49)
استفاده از رله های اضافه بار حرارتی مکانیکی معمولاً به استارترهای LV NEMA Frame و استارت های MV قدیمی کلاس E2 محدود می شود.
این رله ها به صورت آلیاژ یوتکتیک یا بی متال ساخته می شوند.
در مورد رله هایی که در محدوده فعلی کار می کنند باید نکات زیر را در نظر داشت:
- انتخاب عنصر گرمتر باید براساس جداول سازنده رله متناسب با مشخصات موتور، شرایط دمایی محیط و محل قرارگیری موتور نسبت به رله باشد.
- پس از انتخاب عنصر گرمتر، آلیاژ مورد استفاده در رله غیر قابل تغییر تلقی می شود.
- رله های جدید نسبت به انواع قدیمی (بی متال) دامنه تنظیم بیشتری دارند.
- حافظه حرارتی رله های اضافه بار بی متال برای اضافه بار چرخه ای و استارت مکرر موتور تقریبا مناسب هستند.
- ویژگی بازنشانی (ریست) دستی در دسترس است.
- این رله ها به صورت دمای محیط جبران شده یا نشده موجود هستند.
وقتی رله و موتور در شرایط محیطی یکسان باشند، نوع بدون جبران یک مزیت است زیرا
زمان باز شدن رله با دما تغییر می کند. - دستگاه های الکترونیکی برای محافظت در برابر اضافه بار نیز موجود هستند.
برای استارترهای موتور LV، دستگاه های الکترونیکی، گاهی اوقات به همراه کنتاکتور، جریان را در هر سه فاز حس می کنند.
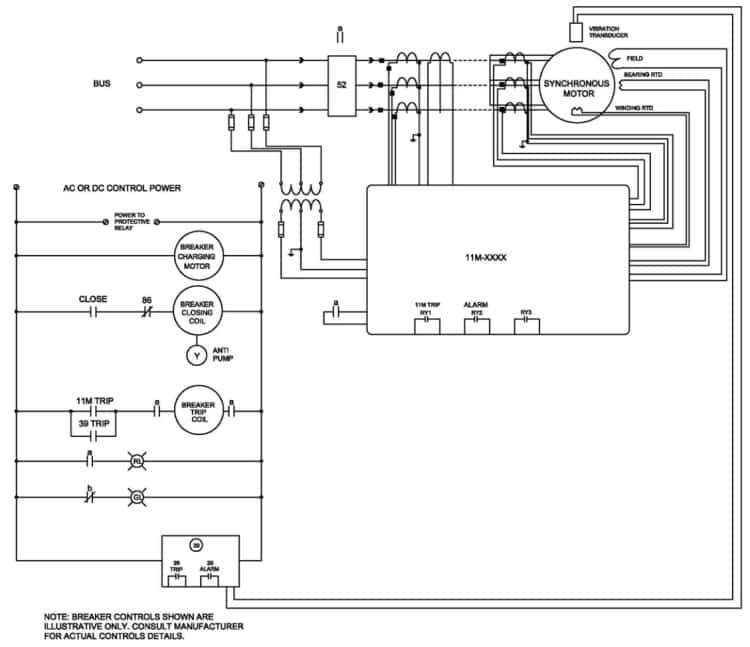
11-3# حفاظت موتورهای الکتریکی در برابر انتقال یا بسته شدن مجدد باس
انتقال خودکار: در صورت از دست دادن منبع تغذیه برای حفظ تداوم کار، باس های موتور باید به یک منبع جدید انتقال یابند.
یک بازه زمانی وجود دارد که باس موتور به هیچ منبعی متصل نیست و
در طی آن موتورهای متصل به باس شروع به کند شدن می کنند و ولتاژ و فرکانس میرایی را روی باس ایجاد می کنند.
با انتقال به منبع جدید، ولتاژ و فرکانس بالا رفته و به سیم پیچ های موتور آسیب می رساند.
وصل مجدد: هنگامی که ولتاژ منبع قطع می شود، در ابتدا موتورها به چرخش ادامه می دهند و
یک نیروی الکتریکی برگشتی (emf) ایجاد می کنند.
این ولتاژ با سرعت موتور و فلوکس داخلی کاهش می یابد.
اگر ولتاژ منبع خارج از فاز با ولتاژ باس جمع شود، جریان زیاد می تواند به سیم پیچ موتور آسیب برساند و
گشتاورهایی را ایجاد کند که به شافت، پایه، اتصال درایو، تجهیزات متحرک و چرخ دنده آسیب برساند.
هنگام بسته شدن مجدد حفاظت های زیر باید در نظر گرفته شوند:
- تأخیر در بازیابی ولتاژ سیستم با استفاده از تایمر (دستگاه 62) به منظور میرایی کافی ولتاژ داخلی موتور.
معمولاً این مقدار 25% ولتاژ نامی در نظر گرفته می شود. - استفاده از یک عنصر افت فرکانس با سرعت بالا (دستگاه 81) برای تشخیص قطعی منبع تغذیه و حرکت موتورها قبل از بازیابی ولتاژ تغذیه.
- استفاده از عناصر افت ولتاژ تک فاز (دستگاه 27) یا سه فاز.
- استفاده از یک عنصر بدون توان (افت جریان) (دستگاه 37)
- استفاده از یک عنصر توان معکوس (دستگاه 32)
اگر مدارهای موتور بتوانند به مدت کافی از انرژی خارج شوند تا
قبل از اینکه دوباره موتور به تغذیه وصل شود ولتاژ باقیمانده کاملا میرا شده و مشکل برطرف می شود.
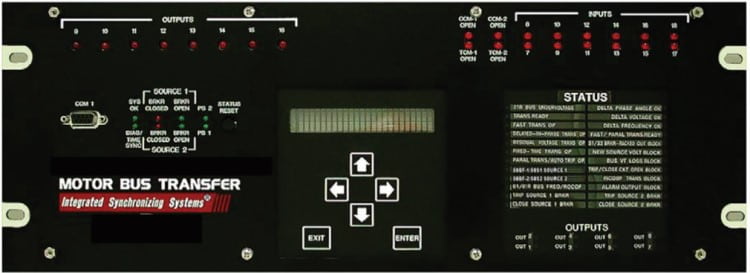
12-3# رله چند منظوره
رله حفاظت موتورهای الکتریکی چند منظوره پیشرفت مهمی بوده است.
این رله که به عنوان ابزاری قدرتمند شناخته می شود شامل بسیاری از توابع محافظتی است که
معمولا با استفاده از رله های محافظ جداگانه اعمال می شود.
با استفاده از رله چند منظوره، تمام عناصر محافظتی در یک محفظه گنجانیده شده اند.
به عنوان مثال حفاظت اتصال کوتاه و اضافه جریان را برای هر فاز، تمام فازها با هم و برای محافظت از خطای زمین، فراهم می کند.
بسته به گزینه های انتخاب شده، رله می تواند شامل محافظت در برابر توقف ناگهانی، روتور قفل شده، دمای بیش از حد و عدم تعادل جریان باشد.
ضبط شکل موج، محافظت از استارت مکرر، ثبت اطلاعات خطا، کشف خرابی نوار روتور و بارگذاری موتور از توابع تشخیصی و نظارتی این رله است.
رله های چند منظوره مدرن با استفاده از یک مدل حرارتی (دستگاه 49) حالت حرارتی موتور را مدل می کنند.
به طور کلی، محاسبات ظرفیت حرارتی (TC) (نسبت به منحنی های محافظت از اضافه جریان) به منحنی های آسیب موتور نزدیک تر هستند.
این رله ها معمولا دارای پنل هایی صفحه های LCD هستند و قابلیت تنظیم با کامپیوتر را دارند.

این رله ها علاوه بر حفاظت اضافه بار، حفاظت افت جریان (و افت توان) را برای پمپ ها فراهم می کنند تا
محافظت از کاویتاسیون و خطای زمین و موارد دیگر را فراهم کنند.
اکنون در برخی از رله های چند منظوره قابلیت تشخیص آرک نیز گنجانده شده است.
نوع خطا، علت خطا، وضعیت اجرا/توقف، جریان کار و سایر پارامترها را می توان از صفحه نمایش رله خواند.
برای نصب در مراکز کنترل موتور پورت های HMI از راه دور نیز ممکن است تعبیه شوند.
در مباحث مربوط به موتورهای فشار متوسط از مرجع حفاظت موتورهای الکتریکی کاربرد این رله مورد بررسی قرار خواهد گرفت.
4# حفاظت موتورهای الکتریکی LV
این بخش از مرجع حفاظت موتورهای الکتریکی به حفاظت موتورهای فشار ضعیف اختصاص یافته است.
1-4# مقدمه
به طور معمول، موتورهای LV تجهیزات پردازشی کوچک و تجهیزات کمکی را هدایت می کنند.
این موتورها می توانند پیوسته کار کنند و ممکن است در کاربردهای چرخه ای باشند.
در این موارد در مراکز کنترل موتور (MCC) از کنتاکتور یا استارت های ترکیبی استفاده می شود.
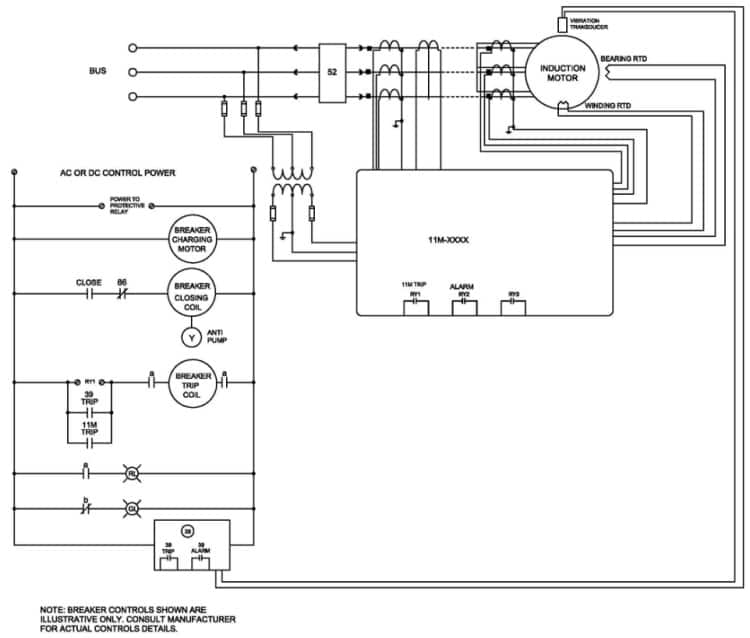
حفاظت از موتور LV به پنج ناحیه اصلی تقسیم شده است که در شکل زیر نشان داده شده است.
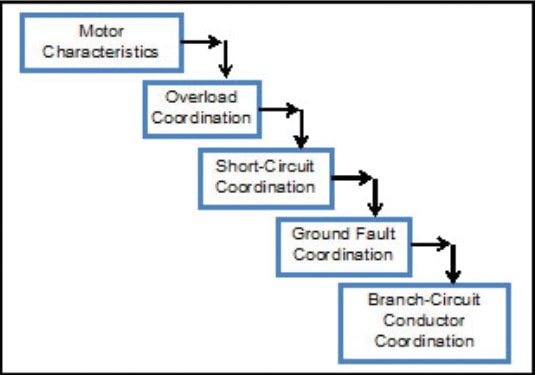
انتخاب داده و دستگاه از هر منطقه برای دستیابی به حفاظت و انتخاب در منطقه بعدی استفاده می شود.
با تجزیه و تحلیل هر ناحیه حفاظتی، منحنی های دستگاه محافظ به نمودار هماهنگی اضافه می شود.
نمودارهای یک خطی استارترهای LV معمولی برای کاربردهای صنعتی با استفاده از MCC یا استارت ترکیبی در شکل زیر نشان داده شده است.
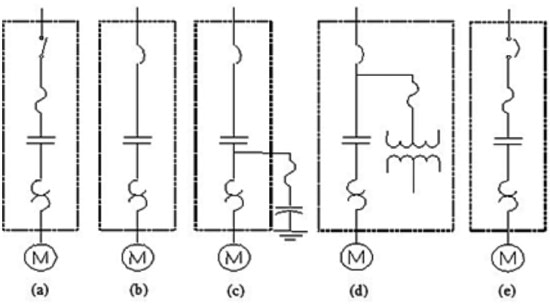
- استارت معمولی با فیوز
- استارت معمولی با دژنکتور
- مکان معمول برای خازن های اصلاح ضریب قدرت
- مکان معمول برای ترانسفورماتور قدرت کنترل
- استارت معمولی با سوئیچ موردی و فیوزه
2-4# حفاظت موتورهای الکتریکی در برابر اضافه جریان
حفاظت اضافه بار موتورهای LV معمولا توسط رله های اضافه جریان حرارتی یا دستگاه های اضافه جریان الکترونیکی انجام می شود.
در برخی موارد ممکن است فیوزهای دو عنصری یا دژنکتور حرارتی-مغناطیسی به عنوان تجهیزات اصلی محافظت اضافه بار عمل کنند؛
اما معمولا از رله های اضافه بار محافظت پشتیبان دارند.
محافظت از اتصال کوتاه برای موتورهای ولتاژ پایین معمولا توسط فیوزها، دژنکتور حرارتی-مغناطیسی یا دستگاه حرکت فوری (یا محافظت از مدار موتور) در ترکیب با یک رله اضافه بار انجام می شود.
حفاظت از خطای زمین برای موتورهای ولتاژ پایین معمولا توسط دستگاه محافظت اتصال کوتاه انجام می شود؛
اما ممکن است رله خطای زمین نصب شود.
اگر برای هر موتور خازن های تصحیح ضریب قدرت نصب شده باشند نیازی به تنظیم جریان در دستگاه های اضافه بار نیست.
هنگامی که خازن ها بین دستگاه اضافه بار و موتور نصب می شوند، رله اضافه بار امپدانس مدار را ایجاد می کند که رزونانس را دمپ کند.
با این حال، درجه جریان رله اضافه بار باید به نحوی تنظیم شود تا
جریان کاهش یافته را که به دلیل ترکیب موتور و خازن است، لحاظ کند.
فیوزهای تاخیر زمانی (دو عنصری) و فیوزهای بدون تاخیر زمانی نیز در دسترس هستند که
می توانند از اتصال کوتاه و خطای زمین محافظت کنند اما هیچ گونه محافظت پشتیبانی ایجاد نمی کنند.
این قطع کننده های مدار در صورت ساخت با عناصر حرارتی – مغناطیسی از 10 تا 3000 آمپر و در صورت ساخت با عناصر حالت جامد تا 5000 آمپر در دسترس هستند.
3-4# حفاظت موتورهای الکتریکی در برابر خطای زمین
در بسیاری از کاربردهای موتور LV از فیوز یا کلید MCCB برای محافظت از خطای زمین استفاده می کنند.
با این حال، نوع حفاظت انتخاب شده به نوع زمین سیستم بستگی دارد.
در سیستم های زمین شده کامل فیوزها و قطع کننده های مدار، حافظت کافی از خطای زمین موتورهای موجود را فراهم می کنند.
با این حال، برای کاربردهای موتورهای بزرگتر ناهماهنگی رخ می دهد.
ناهماهنگی می تواند در ناحیه بین دستگاه قطع زمین روی دژنکتور قدرت ولتاژ پایین اصلی (LVPCB) و دژنکتور لحظه ای که از موتور محافظت می کند، رخ دهد.
برای سیستم های زمین شده کامل، دستگاه های حفاظتی باید به نحوی سیم کشی شوند که
بریکر باز کنند و نه کنتاکتور را، مگر اینکه کنتاکتورها به اندازه کافی درجه بالا باشند که جریان خطای موجود را قطع کنند.
همچنین، می توان ترانسفورماتورهای جریان توالی صفر (CT) و واحدهای تریپ را برای قطع موازی دژنکتور یا سوئیچ نصب کرد،
به شرط آنکه دژنکتور یا سوئیچ شامل یک تریپ شنت باشد (تریپ های شنت معمولا سفارشی هستند، نه استاندارد).
سیستم های زمین شده با مقاومت کم معمولا در کاربردهای LV استفاده نمی شوند زیرا
ممکن است جریان های خطای زمین برای کارکرد دستگاه های محافظتی آنقدر زیاد نباشند.
برای این سیستم ها که جریان خطا معمولا 5 تا 10 آمپر است، محافظت از خطای زمین موتور جداگانه تعبیه نمی شود.
حذف خطای زمین اول برای جلوگیری از افزایش صدمه ناشی از خطای زمین دوم در یک فاز دیگر مهم است.
4-4# اضافه دمای سیم پیچ استاتور (تجهیز 49S)
هدف از حفاظت اضافه دمای سیم پیچ استاتور تشخیص دمای بیش از حد سیم پیچ استاتور قبل از وقوع آسیب موتور است.
در موتورهای ولتاژ پایین با کاربرد عادی، معمولا از سنسورهای دما استفاده می شود تا
مدار کنترل موتور را قطع کرده و کنتاکتور را باز کنند.
1) سنسور اضافه دما – ترموستات
ترموستات ها متداول ترین سنسورهای دمای استاتور هستند که
در موتورهای 3 فاز 460 ولت از 11 کیلووات تا 150 کیلووات نصب می شوند.
ترموستات ها، دستگاه های بی متال در حالت عادی بسته (یا در حالت عادی باز) هستند که در یک دمای ثابت کار می کنند.
آنها معمولا در ولتاژ 120 ولت و به صورت سری با مدار کنترل سیم کشی می شوند.
2) سنسور اضافه دما – ترمیستور
ترمیستورها رله ها را برای عملکردهای هشدار یا قطع یا هر دو فعال می کنند.
مقاومت ویژه ترمیستور نسبت به دما غیرخطی است و
بنابراین برای نشان دادن دما استفاده نمی شوند.
ترمیستورها باید با دستگاه کنترل تطبیق شوند.
دو نوع ترمیستور وجود دارد:
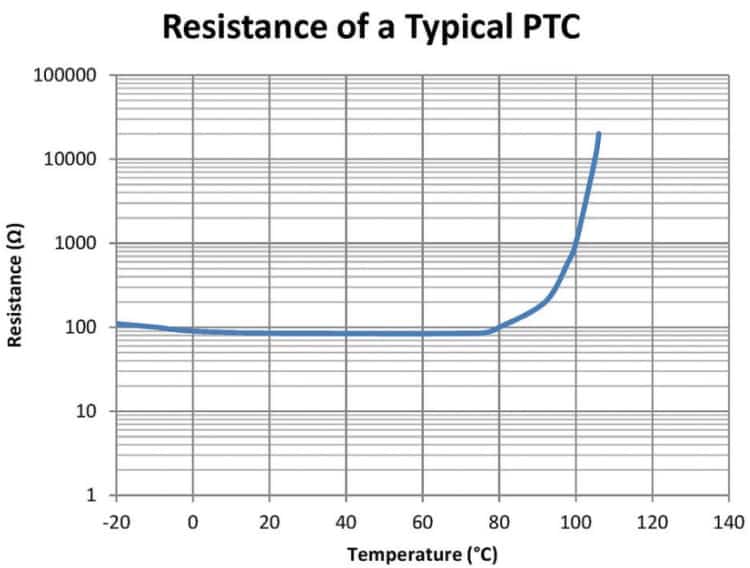
1- ضریب دمای مثبت (PTC): مقاومت یک PTC با افزایش دما افزایش می یابد.
شرایط شرایط دمای بالا با یک مدار باز ظاهر می شود و رله را فعال می کند.
این چیدمان از نظر خطا ایمن است.
همانطور که در شکل زیر نشان داده شده است، در دمای 100 درجه سانتیگراد این نوع ترمیستور دارای مقاومت 1 کیلو اهم است.
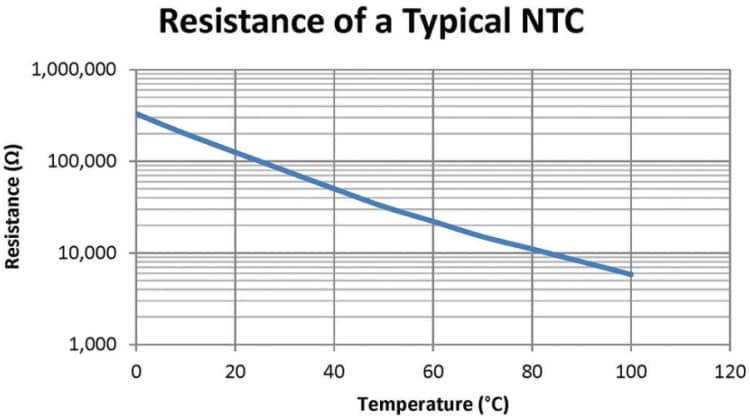
2- ضریب دمای منفی (NTC): مقاومت یک PTC با افزایش دما کاهش می یابد.
مدار باز در این ترمیستور به عنوان شرایط دمای پایین در نظر گرفته می شود و باعث عملکرد رله نمی شود.
این دستگاه در درجه اول دما را کنترل می کند تا اینکه یک رله را برای محافظت فعال کند.
3) سنسور اضافه دما – کاشف دمای مقاومتی (RTD)
RTD ها ممکن است در موتورهای ولتاژ پایین با کاربرد مهم در نظر گرفته شود.
در این موارد RTD ها معمولا به دستگاهی متصل می شوند که
زنگ هشدار و یا عملیات تریپ را فعال می کند.
رایج ترین روش، نصب شش RTD (دو تا برای هر فاز) 100 اهم پلاتینی کلاس B از IEC 60751 برای موتورهای کوچک و 100 اهم پلاتینی کلاس A از IEC 60751 برای موتور بزرگ یا مهم است.
5-4# حفاظت موتورهای الکتریکی از افت ولتاژ موتور
حفاظت افت ولتاژ برای محافظت موتور از چندین شرایط آسیب رسان استفاده می شود:
- ولتاژ کم به دلیل فلش ولتاژ
- انتقال خودکار
- بسته شدن مجدد خودکار
- بازیابی شبکه برق
در حالت افت ولتاژ، موتور جریان بیشتری نسبت به حالت عادی می گیرد و
حرارت آن به طور غیر عادی زیاد می شود.
وقتی در هنگام اتصال مجدد و یا انتقال خودکار ولتاژ منبع تغذیه تغییر می کند، موتورها در ابتدا به چرخش ادامه می دهند و
ولتاژ داخلی را حفظ می کنند.
این ولتاژ با سرعت موتور و فلوکس داخلی میرا می شود.
اگر ولتاژ سیستم خارج از فاز با ولتاژ داخلی موتور جمع شود، هجوم رخ می دهد.
چنین جریانی می تواند به سیم پیچ موتور آسیب برساند یا گشتاورهایی ایجاد کند که
به شافت، پایه، اتصال درایو و یا چرخ دنده آسیب برساند.
وقتی (پس از قطع) برق بازیابی شد، توالی استارت باید طوری برنامه ریزی شود که
تمام موتورهای سیستم به طور همزمان روشن نشوند.
رله های افت ولتاژ، ولتاژ پایین معمولا دستگاه های الکترونیکی هستند که هر سه فاز را مانیتور می کنند.
این دستگاه ها را می توان با تأخیر در قطع، تأخیر در راه اندازی مجدد یا بدون تاخیر در قطع و راه اندازی مجدد تهیه کرد.
برخی از MCCB ها با رهایی افت ولتاژ (UVR) در دسترس هستند که
دژنکتور را در شرایط ولتاژ پایین قطع می کند.
دژنکتور باید بصورت دستی تنظیم شود.
در مواردی که راه اندازی مجدد خودکار لازم است، نباید از این روش استفاده شود.
در این بخش از مرجع حفاظت موتورهای الکتریکی به موتورهای فشار ضعیف پرداختیم.
سپس در بخش بعد از مرجع حفاظت موتورهای الکتریکی، موتورهای فشار متوسط مورد بررسی قرار خواهند گرفت.
5# حفاظت موتورهای الکتریکی MV
این بخش از مرجع حفاظت موتورهای الکتریکی به انواع خطاها و رله های مناسب برای تشخیص آن ها در سیستم های فشار متوسط اختصاص یافته است.
1-5# مقدمه
به طور معمول، موتورهای بزرگ تجهیزات اصلی سیستم را هدایت می کنند و
معمولا این موتورها مدت زمان طولانی به طور مداوم (گاهی سال ها) کار می کنند.
برای کنترل توقف و استارت، از قطع کننده های مدار MV برای تغذیه موتورهای بزرگ استفاده می شود.
درجه بندی ولتاژ موتور MV 2300 ولت، 4000 ولت، 6600 ولت و 13200 ولت است.
وقتی موتور باید مرتبا استارت شود، بهتر است به جای دژنکتور، از کنتاکتور در یک کنترلر ترکیبی با یک فیوز محدود کننده جریان (به دلیل عمر بیشتر کنتاکتورها) استفاده کرد.
هنگام استفاده از کنترلرهای فیوزدار MV بر روی سیستم های ستاره زمین شده کامل، دقت داشته باشید زیرا
ممکن است برای قطع خطا با جریان زیاد (از جمله خطای زمین) کنتاکتور درجه بندی نشده باشد.
باید بین جریان خطای موجود در سیستم قدرت و کنترلر یک مقایسه انجام شود.
اگر کنتاکتورها برای قطع جریان خطا در محل اعمال کنترلر درجه بندی مناسب نداشته باشند،
رله های خطای زمین و رله های تفاضلی نباید کنتاکتور را باز کنند.
این تجهیزات محافظتی باید تا زمانی به تأخیر بیفتند که
فیوزهای جلوتر از کنتاکتور زمان لازم برای رفع خطا را داشته باشند،
یا اینکه رله ها باید دستگاه بالادست جایگزین را (که برای قطع جریان خطا درجه بندی می شود) قطع کنند.
در اصل، محافظت از موتورهای MV مشابه موتورهای LV است اما تجهیزات بیشتری مورد نیاز است.
موتورهای MV که به منبع تغذیه تاسیسات نزدیک تر هستند،
اغلب بیشتر در معرض افت ولتاژ و اضافه ولتاژ، بسته شدن مجدد و سطح خطای بالاتر هستند.
به دلیل ولتاژ باس و جریانهای بار بالاتر، از ترانسفورماتور برای کاهش این جریانات به مقادیر متناسب با رله های محافظ استفاده می شود.
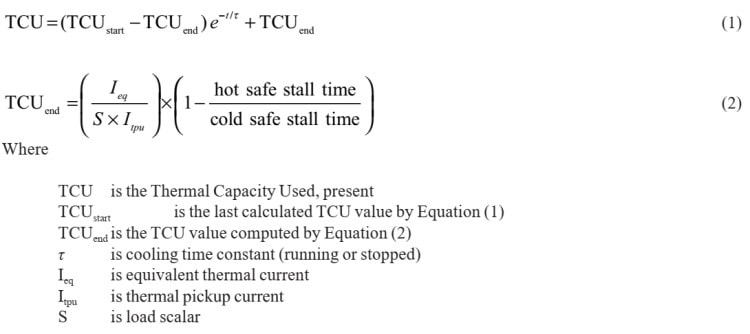
2-5# حفاظت اضافه بار موتورهای الکتریکی (تجهیز 49)
موتورها هنگام کار گرما تولید می کنند.
استفاده از یک مدل دقیق از حرارت دهی موتور (با استفاده از جریان معادل موتور) حداکثر عملکرد بدون آسیب به موتور را به همراه دارد.
موتورهای الکتریکی هنگام کار برای رفع گرمای حاصل از تلفات، به خنک کننده نیاز دارند.
محیط خنک کننده موتور در حال کار به نوع محفظه موتور بستگی دارد.
حفاظت حرارتی موتور برای طول عمر موتور حیاتی است چرا که
به ازای هر 10 درجه سانتیگراد افزایش دما، عمر عایق موتور به نصف کاهش می یابد.
روش های قدیمی از عناصر اضافه جریان 50 و 51 استفاده می کردند و
فاقد دستگاه های کاشف دمای مقاومتی (RTD) پشتیبان بودند.
برای اضافه بارهای چرخه ای (به عنوان مثال، سنگ شکن ها، موتورهای تسمه نقاله) حفاظت دستگاه 49 مدل حرارتی برتری دارد زیرا منحنی های توان حرارتی موتور را با دقت بیشتری مدل می کند.
در هنگام اضافه بار، حرارت دهی موتور یک اثر طولانی مدت است (برای افزایش دمای جرم موتور زمان لازم است).
مدل حرارتی این حرارت دهی را ردیابی می کند و
امکان حفاظت اضافه بار موقتی را فراهم می کند.
پیش از رسیدن موتور به دمای بحرانی حفاظت اضافه جریان به سرعت موتور را قطع می کند.
هنگامی که چرخه اضافه بار به حالت کمتری می رسد مدل حرارتی، نتایج خنک کننده موتور را ردیابی می کند.
به طور کلی، با حفاظت دستگاه 49، منحنی محافظت موتور می تواند مستقیما در زیر منحنی های آسیب دیدگی استارت و کار قرار گیرد و شکل منحنی آسیب را دقیقا تکرار می کند.
نمونه ای از محاسبه ظرفیت گرمایی یک سازنده موتور در معادلات زیر نشان داده شده است:
3-5# حفاظت اضافه جریان موتورهای الکتریکی
یک منحنی موتور NEMA طرح A یا طرح B با محافظت برای راه اندازی و کار با استفاده از دستگاه 51، یک عنصر رله اضافه جریان با مشخصات معکوس یا معکوس شدید، در شکل زیر نشان داده شده است.
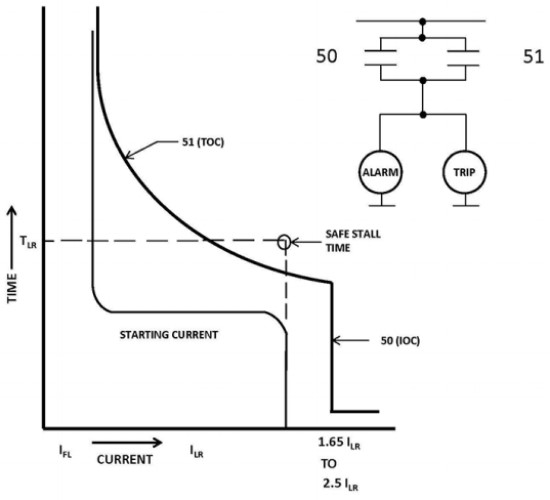
دستگاه 50 فقط برای کاربردهای دژنکتور توصیه می شود و
برای استارترهای فیوزدار توصیه نمی شود.
به طور معمول از سه عنصر اضافه جریان استفاده می شود، هر عنصر از یک CT جداگانه تأمین می شود.
مطابق شکل زیر، محافظت برای بار با اینرسی بالا باعث افزایش زمان شتاب گیری می شود.
یک موتور معمولی در عرض 10 تا 15 ثانیه به سرعت نامی می رسد اما
با وجود یک بار با اینرسی بالا ممکن است 30 ثانیه یا بیشتر طول بکشد.
در نتیجه، اختلاف زمانی کمی بین منحنی جریان شتاب دهنده و محدودیت های حرارتی موتور وجود دارد.
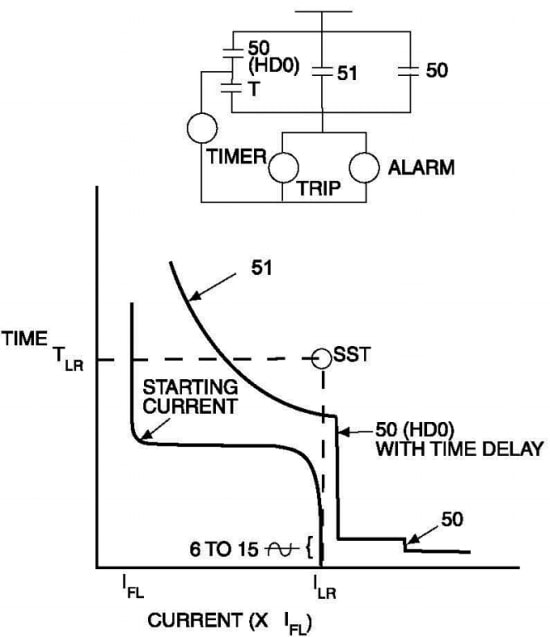
در شکل زیر، دستگاه 51 دارای ویژگی های زمان معکوس یا معکوس شدید طولانی مدت است که
بالاتر از جریان شتاب تنظیم شده است.
برای شروع، تأخیر کمتر از 1 ثانیه لازم است تا
دستگاه 50 (HDO) در pu 1.15 جریان روتور قفل شده (LRC) تنظیم شود.
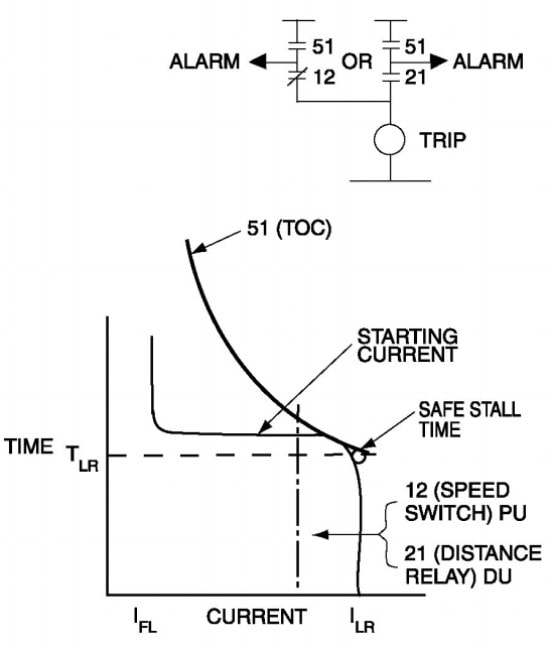
شکل زیر روش دوم را برای محافظت از موتور با اینرسی بالا نشان می دهد.
این روش نیز از دو عنصر دستگاه 50 در هر فاز استفاده می کند.
دستگاه 50 معمولی برای محافظت در برابر اتصال کوتاه تنظیم شده است.
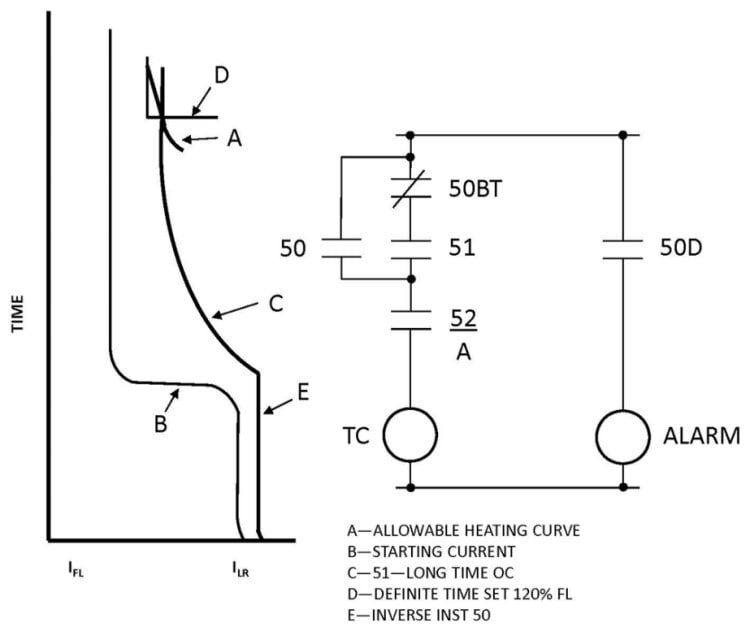
دستگاه 50BT دوم با عنصر اضافه جریان دستگاه 51 لینک می شود و
از قطع شدن توسط دستگاه 51 در شرایط اضافه جریان کمتر از تنظیمات دستگاه 50BT جلوگیری می کند.
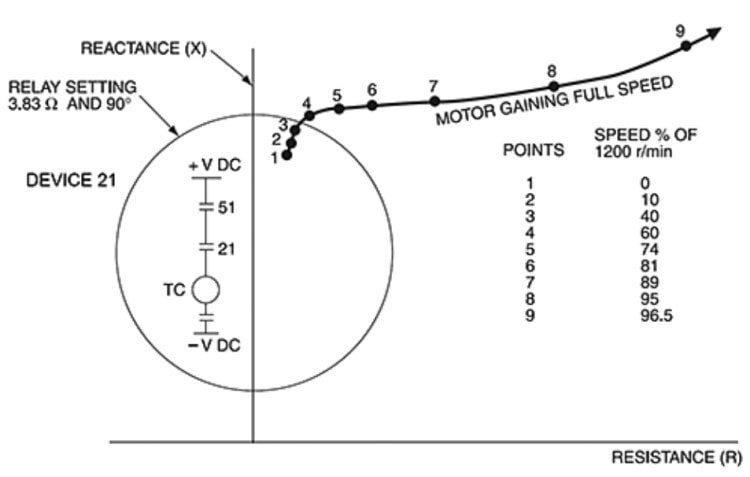
مطابق شکل زیر اگر موتور با اینرسی زیاد در یک دوره به یک سرعت خاص شتاب نگرفت، با تکیه بر ویژگی های یک عنصر فاصله امپدانسی (دستگاه 21) اجازه قطع را می دهد.
4-5# حفاظت خطای زمین
هدف از حفاظت خطای زمین:
- شناسایی شرایط خطای زمین بدون تأخیر داخلی
- اطمینان از این که عدم تعادل جریان نشان دهنده خطای زمین واقعی است
1) رله تفاضلی معمولی
محافظ تفاضلی جریان موتور، جریان موجود در یک بار را اندازه گیری می کند و
آن را با جریان اندازه گیری شده در سمت خنثی موتور مقایسه می کند.
در حالت عملکرد نرمال جریان ورودی و خروجی با هم برابر هستند.
اختلاف جریان به عنوان خطا تشخیص داده می شود.
یک رله تفاضل فاز معمولی خطاهای فاز سطح پایین را حس می کند و
سریعا برق را قبل از ایجاد آسیب گسترده موتور از بین می برد.
این طرح از شش CT یکسان (برای هر فاز یک جفت) و سه رله (هر فاز یک عدد) استفاده می کند.
اندازه CT ها باید طوری انتخاب شود که بتواند جریان بار کامل را به طور مداوم حمل کند و
در هنگام خرابی خارجی یا داخلی اشباع نشود (شکل زیر).
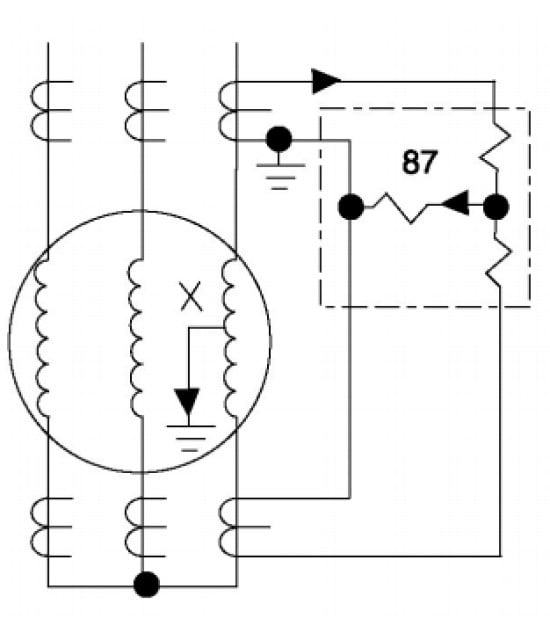
جریان های حاصل از هر جفت CT در شرایط عادی (یعنی بدون خطا) از طریق سیم پیچ های مهار کننده رله گردش می کنند.
در صورت بروز خطا در سیم پیچ موتور یا در کابل، جریان های ثانویه CT دارای اندازه ها و یا پلاریته های متفاوت هستند و
جریان تفاضلی از هر CT به دیگری اضافه می شود و
دستگاه 87 را فعال می کند تا دژنکتور موتور را قطع کند.
برای موتور با اتصال ستاره، سه CT به طور معمول در استارت (یا تابلو موتور) و سه تای دیگر در سه فاز در سمت خنثی سیم پیچ موتور قرار دارند.
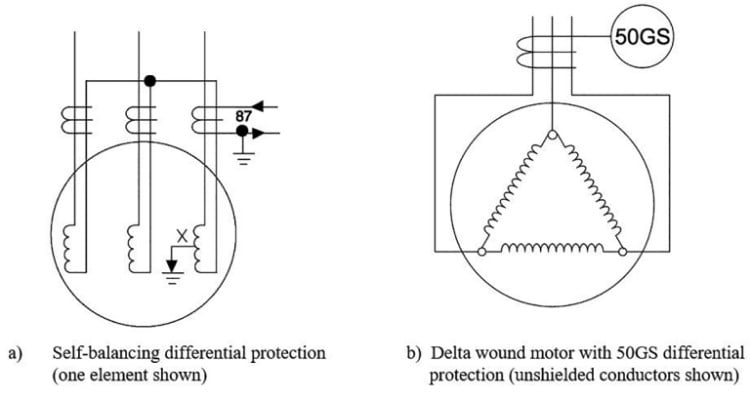
در موتور با اتصال مثلث، حفاظت تفاضلی از دستگاه (دستگاه 50GS) پیاده سازی راحت تری دارد.
برای حافظت تفاضلی متعارف، یک جعبه اتصال بزرگ برای نصب CT ها و اتصال سیم پیچ مثلث مورد نیاز است.
2) رله تفاضلی خود متعادل
برای حفاظت تفاضلی خود متعادل (دستگاه 87M)، سه CT پنجره ای (یا توروئیدی) در موتور نصب می شوند.
در هر فاز متصل به موتور یک CTنصب می شود و
از درون هر CT سیم خنثی عبور داده می شود فلو سیم فاز را خنثی کند.
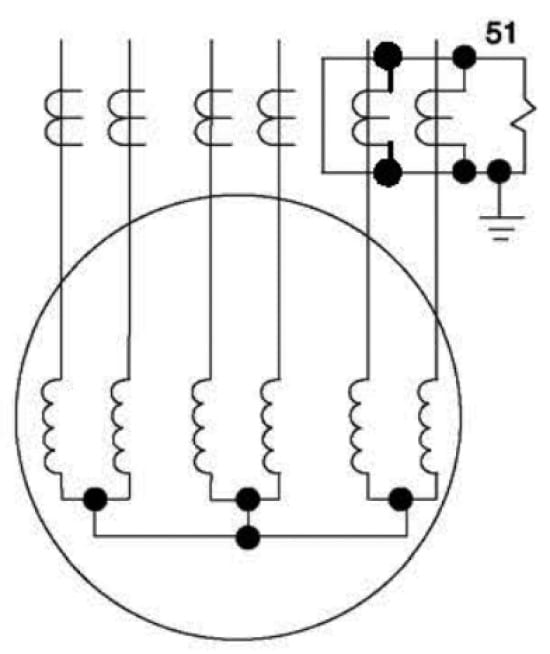
3) حفاظت سیم پیچ تقسیم شده
هنگام ارزیابی حفاظت عدم تعادل جریان سیم پیچ تقسیم شده باید عوامل زیر را در نظر گرفت:
- هزینه کل کمتر از تفاضل جریان متعارف و بیشتر از تفاضلی خود متعادل
- جریان انتخابی اولیه کمتر از نصف تفاضل فاز معمولی و بیشتر از تفاضلی خود متعادل
- تاخیر زمانی کمتر
- با قرار دادن CT ها در استارت موتور، خرابی در کابل ها را تشخیص می دهد
- توانایی تشخیص اتصال کوتاه در حلقه های سیم پیچ
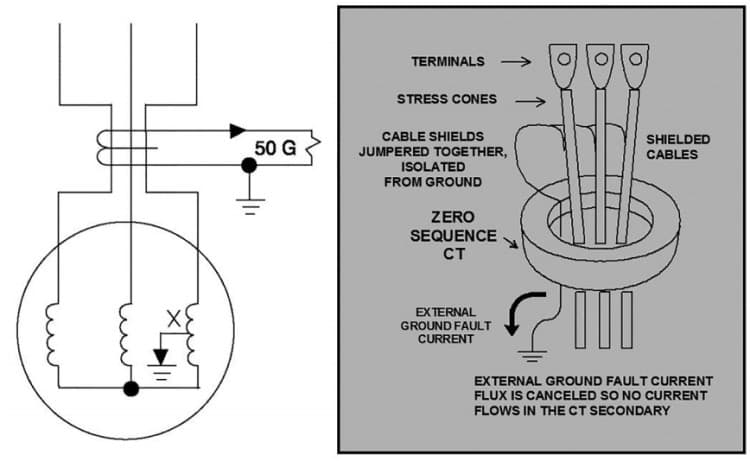
در استفاده از رله و CT توالی صفر و نصب کابل ها از طریق CT اقدامات زیر باید رعایت شوند:
- اگر از پوتهد (pothead) استفاده شود، باید روی یک براکت عایق نسبت به زمین نصب شود
- اگر کابل با پوشش فلزی از پنجره CT عبور کند، پوشش فلزی باید در سمت منبع CT باشد و نسبت به زمین عایق باشد
- باید یک هادی زمین از پنجره CT عبور کند و سپس به حفاظ متصل شود
استفاده از اتصال باقیمانده از سه CT برای تغذیه رله خطای زمین ایده آل نیست زیرا
جریان های فاز بالا (به عنوان مثال، ناشی از هجوم موتور یا خطاهای فاز) می توانند باعث اشباع نابرابر CT ها و ایجاد اشتباه در اندازه گیری جریان باقیمانده شوند.
در نتیجه ممکن است قطع ناخواسته رله زمین اتفاق بیفتد.
هدف از ایجاد مقاومت در برابر زمین، تأمین جریان کافی برای رله های محافظتی است که
با تشخیص خطای زمین فعال می شوند.
اما به اندازه کافی کوچک است تا آسیب موتور را محدود کند.
با این حال، جریان خطای زمین نباید آنقدر کوچک باشد که سیم پیچ های نزدیک انتهای خنثی محافظت نشوند.
در بخش بعد از مرجع حفاظت موتورهای الکتریکی قصد داریم خطاهای رایج در موتورهای سنکرون را نیز مورد بررسی قرار دهیم.
6-5# حفاظت موتورهای الکتریکی سنکرون
موتور سنکرون توسط نیروی dc اعمال شده به روتور تحریک می شود.
بنابراین، عملیات حفاظتی بیشتری مورد نیاز است.
طرح های حفاظت الکترومکانیکی و الکترونیکی با ارزیابی دو یا چند مقدار زیر، دما را شبیه سازی می کنند:
- بزرگی جریان میدان القایی (که با عبور از مقاومت تخلیه میدان حاصل می شود)
- فرکانس جریان میدان القایی
- فاصله (وقفه) زمانی پس از شروع
برخی از دلایل صفر شدن جریان میدان موتور سنکرون در حال کار به شرح زیر است:
- قطع شدن تحریک کننده از راه دور
- فرسودگی سیم پیچ کنتاکتور میدان
- قطع تصادفی میدان
- اتصال با مقاومت بالا یا مدار باز بین اسلیپ رینگ و جاروبک
- خرابی پل دیود بر روی دیودهای چرخان تحریک کننده
- افت ولتاژ منبع
و شرایط جریان میدان کاهش یافته به دلیل دلایل زیر رخ می دهد:
- توقف موتور دارای اضافه بار
- موتور کم باری که قادر به پذیرش بار نیست
- موتور با بار مناسب، ممکن است از افت ولتاژ AC خارج شود
- تحریک ناشی از سیستم قدرت توسط موتورهای بزرگ ممکن است باعث افت ولتاژ سیستم شده و
تداوم سرویس را برای موتورهای دیگر به خطر بیندازد.
دستگاه 56 رله ای است که دارای کنترل خودکار تحریک میدان به موتور AC است (مربوط به عملکرد کنترل مجاز).
خروج از پله معمولا توسط یکی از رله های زیر تشخیص داده می شود:
- رله ضریب توان (دستگاه 55) با ورودی از VT ها و CT ها به ولتاژ و جریان استاتور موتور
- رله لحظه ای متصل شده در ثانویه ترانسفورماتور
- رله بدون تحریک ژنراتور (دستگاه 40)
- حفاظت خارج از پله (دستگاه 78)
برای کاهش قرار گیری در معرض گشتاورهای آسیب رسان، می توان از یک عنصر افت ولتاژ سه فاز سرعت بالا (دستگاه 27) برای شناسایی شرایط اتصال کوتاه استفاده کرد.
7-5# حفاظت راه اندازی
این بخش حفاظت توالی استارت ناقص و استارت بیش از حد (در یک بازه زمانی کوتاه) را مورد بحث قرار می دهد.
برای نظارت بر زمان استارت موتور از یک تایمر، دستگاه 48، استفاده می شود.
زمان زیاد راه اندازی موجب گرم شدن بیش از حد موتور می شود.
تایمر با یک کنتاکت کمکی در استارت موتور شروع می شود و
یک زمان مشخص را طی می کند (که کمی بیشتر از زمان استارت تا کار نرمال موتور است).
برای موتورهای سنکرون، حفاظت از توالی استارت ناقص (دستگاه 48) معمولا تایمری است که
مانع از قطع حفاظت خطای جریان میدان می شود و در طول استارت عادی حفاظت را قطع می کند.
موتورهای القایی روتور پیچشی و موتورهای با استارت ولتاژ کاهش یافته،
برای محافظت از توالی استارت ناقص (دستگاه 48)، باید دارای تایمری باشند که
از خطا در رسیدن به شرایط کار نرمال در زمان استارت نرمال محافظت کند.
محافظت های زیر در برابر استارت بیش از حد موجود هستند:
- یک تایمر که با یک کنتاکت کمکی در استارت موتور شروع می شود،
با کنتاکت تنظیم شده برای جلوگیری از استارت دوم تا زمانی که فاصله زمانی از پیش تعیین شده سپری شود (دستگاه 48) - عنصر اضافه بار حرارتی استاتور (دستگاه 49S). این محافظت به موارد زیر بستگی دارد:
-
- زمان و اندازه طبیعی هجوم موتور
- ظرفیت حرارتی کار که قبلا
- محافظ سیم پیچ حرارتی در موتورهای سنکرون
- حفاظت از دمای بیش از حد روتور (49R)
- حفاظت از اضافه جریان روتور قفل شده (دستگاه 51LR)
- رله های چند منظوره که توانایی برنامه ریزی برای محدود کردن تعداد استارت را دارند
بخش بعدی مرجع حفاظت موتورهای الکتریکی به بررسی حفاظت سیم پیچ در موتورهای سنکرون و القایی می پردازد.
8-5# حفاظت سیم پیچ روتور
در مرجع حفاظت موتورهای الکتریکی مبحث حفاظت سیم پیچ روتور برای موتورهای سنکرون و القایی به صورت جداگانه مورد بررسی قرار می گیرد.
1) موتورهای سنکرون
میدان و منبع میدان نباید عمدا زمین شود.
اگرچه اولین اتصال به زمین، صدمه ای وارد نمی کند اما
اتصال دوم به موتور آسیب می رساند.
بنابراین تشخیص زمین اول مهم است.
بدین منظور روش های زیر استفاده می شوند:
- دو لامپ سری بین مثبت و منفی میدان و نقطه اتصال بین لامپ ها متصل به زمین.
وضعیت زمین با درخشش نابرابر دو لامپ مشخص می شود. - دو مقاومت سری بین مثبت و منفی میدان و نقطه میانی بین مقاومت ها از طریق یک رله لحظه ای مناسب به زمین متصل می شود.
این طرح خطای زمین را در نقطه میانی سیم پیچ میدان تشخیص نمی دهد.
اگر به جای یکی از مقاومت ها از وریستور استفاده شود، نقطه ای در سیم پیچ میدان که در آن نمی توان خطای زمین را تشخیص داد، با بزرگی ولتاژ تحریک تغییر می کند. - سیگنال ولتاژ AC کوچکی را بین مدار میدان و زمین اعمال کرده و شار AC را کنترل کنید تا
مشخص شود چه زمانی خطای زمین مدار میدان وجود دارد
2) موتورهای القایی روتور پیچشی
حفاظت موتورهای الکتریکی القایی روتور پیچشی مانند محافظ توصیف شده برای موتورهای سنکرون است، با این تفاوت که میدان سه فاز ac است.
آسیب در موتورهای با سرعت قابل تنظیم در اثر گشتاورهای با تشدید بالا در هنگام کار با امپدانس های نامتعادل در مدار خارجی روتور ایجاد می شود.
حفاظت مناسب برای تشخیص این خطا در دسترس است اما به ندرت استفاده می شود.
9-5# حفاظت موتورهای الکتریکی در برابر صاعقه و موج
به منظور محدود کردن ولتاژ متاثر از صاعقه و موج سوئیچ معمولا از برقگیرها استفاده می شود.
هر یک بین یک فاز و زمین متصل می شوند.
نیاز به این نوع محافظت به قرار گرفتن موتور و منبع تغذیه مربوط به آن در معرض موج بستگی دارد.
کابل های MV دارای ظرفیت خازنی در محافظ های خود هستند که می توانند باعث موج را ضعیف کنند.
مانند بسیاری از عملیات حفاظتی، مهندس باید اهمیت موتور، توقف فرآیند و هزینه های مربوطه و هزینه های تعویض را در نظر بگیرد.
عایق سیم پیچ استاتور ماشین های چرخان ac، دارای مقاومت ضربه ای نسبتا کمی است.
سیستم های عایق سیم پیچ استاتور در معرض تنش های ناشی از ولتاژهای عملکرد حالت پایدار و موج ولتاژ با دامنه های زیاد قرار دارند.
حفاظت از موج باید در حد امکان نزدیک ترمینال های موتور (در طول مدار) واقع شود، ترجیحا با فاصله 1 متر یا کمتر.
مدار تغذیه باید مستقیما به اولین تجهیزات موج (Surge) متصل شود و سپس به موتور برود.
هنگام اعمال محافظت در برابر موج، عوامل زیر باید در نظر گرفته شوند:
- تعبیه برقگیر و خازن برای موتورهای MV بالاتر از 375 کیلووات است
- تعبیه برقگیر با بررسی امپدانس موج بالاتر برای موتورهایی با قدرت 375 کیلووات و کمتر
- تعبیه برقگیر و خازن برای موتور 150 کیلووات یا بزرگتر یا وقتی موتور حیاتی
در همان سطح ولتاژ موتور به سر باز خطوط متصل است - وقتی ترانسفورماتور در حال اتصال موتورها به خطوط سر باز است
- در مواردی که از قطع کننده های مدار خلا یا SF6 یا کنتاکتورهای خلاء استفاده می شود
10-5# حفاظت موتورهای الکتریکی در برابر تحریک بیش از حد
وقتی ولتاژ منبع تغذیه سوئیچ آف می شود، در ابتدا موتور القایی به چرخش و حفظ ولتاژ داخلی ادامه می دهد.
اگر یک بانک خازن یا یک خط توزیع طولانی با ظرفیت شنت قابل توجه به موتور متصل شود، امکان تحریک بیش از حد وجود دارد.
تحریک بیش از حد زمانی اتفاق می افتد که
منحنی های ولتاژ بر حسب جریان خازن شنت و مشخصه تحریک بدون بار موتور، یکدیگر را در ولتاژی بالاتر از ولتاژ نامی موتور قطع کنند.
حداکثر ولتاژ ممکن، حداکثر ولتاژ مشخصه تحریک بدون بار موتور است (که ویژگی مغناطش یا اشباع نامیده می شود).
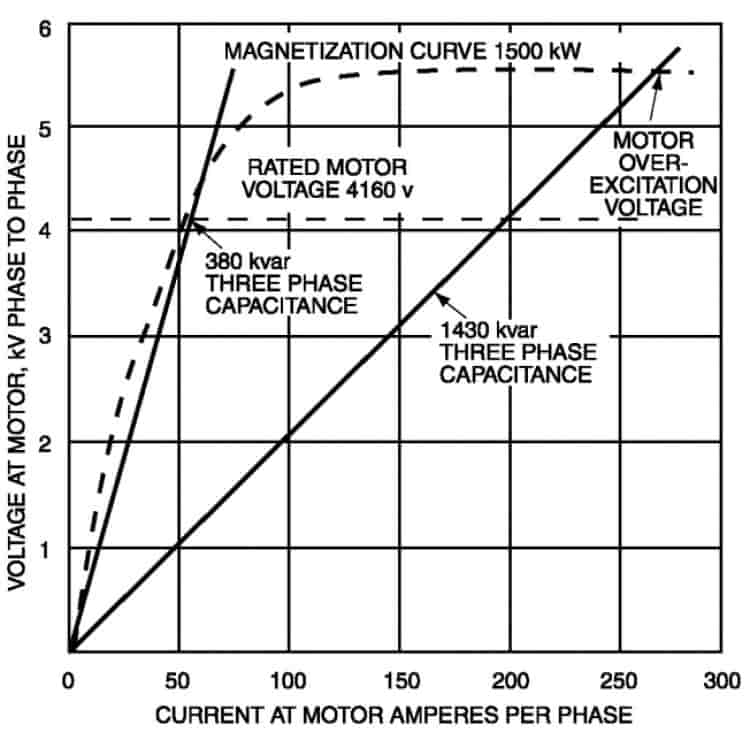
این ولتاژ که با سرعت موتور میرا می شود، می تواند به موتور آسیب رساند.
اگر انتقال یا بسته شدن مجدد خودکار بر روی موتوری اجرا شود که
ولتاژ داخلی قابل توجهی از تحریک بیش از حد دارد، احتمالا هجوم رخ می دهد.
ساده ترین محافظت از تحریک بیش از حد، با قطع منبع تغذیه موتور، یک کنتاکتور جداگانه خازن ها را قطع می کند.
کنتاکتور می تواند توسط عناصر رله اضافه ولتاژ لحظه ای خارج شود.
یک گزینه جایگزین استفاده از رله افت فرکانس پرسرعت است که
در موتورهای با اینرسی بالا یا با بار بالا ممکن است به اندازه کافی سریع نباشد.
اگر در اثر از بین رفتن وسیله قطع کننده محافظ منبع، فرکانس کاهش نیابد، رله افت فرکانس مناسب نیست.
در این موارد می توان از رله اتلاف توان استفاده کرد.
نمونه هایی از این کاربردها به شرح زیر است:
- بالابر حفار با مشخصه پیاده سازی بار با از دست دادن دستگاه اضافه جریان منبع تغذیه
- موتوری که به عنوان ژنراتور القایی با فرآیند منبسط کننده گاز کار می کند
- موتور القایی با تغییر اجباری از ASD
11-5# حفاظت موتورهای الکتریکی در برابر عدم چرخش
وقتی منبع تک فاز باشد یا موتور گیر کرده باشد پدیده عدم چرخش اتفاق می افتد.
محافظت های زیر برای این پدیده در دسترس است:
- از رله ها می توان برای تشخیص تک فاز شدن استفاده کرد
- روش مستقیم برای تشخیص عدم چرخش، استفاده از سنسور و تایمر دور شفت
- تکیه بر عنصر اضافه بار حرارتی (دستگاه 49TC) برای موتورهای القایی بدون جاروبک و استفاده از یک عنصر اضافه جریان فاز زمان معکوس (دستگاه 51) به عنوان پشتیبان
- برای موتورهای سنکرون جاروبکدار تکیه بر حفاظت از سیم پیچ دامپر و محافظت از توالی استارت ناقص طبیعی است.
- یک رله ولتاژ تاخیر قابل تنظیم با حساسیت به فرکانس نیز برای ارائه این محافظت در دسترس است.
- برای موتورهای همزمان جاروبک که دارای زمان روتور قفل شده مجاز بزرگتر از زمان شتاب طبیعی هستند، تکیه بر محافظت از سیم پیچ دمپر و محافظت از توالی شروع ناقص، طبیعی است.
- برای حفاظت استارت موتور القایی بزرگ، می توان از یک عنصر امپدانسی (دستگاه 21) استفاده کرد.
برگشت و قطع یک فاز توسط عنصر ولتاژ فاز معکوس قابل تشخیص است (دستگاه 47).
این عنصر رله نمی تواند برگشت یا تلفاتی را که بین موتور و نقطه اتصال عنصر رله به سیستم رخ می دهد، تشخیص دهد.
این عنصر نباید بیش از 5% عدم تعادل ولتاژ تنظیم شود.
ولتاژهای نامتعادل، جریانهای نامتعادل بزرگی ایجاد می کنند (تقریباً شش تا 10 برابر درصد عدم تعادل ولتاژ).
این جریان های توالی منفی می توانند به سیم پیچ های استاتور موتور آسیب برسانند.
یک روش پشتیبان برای کاهش آسیب سیستم توان نامتعادل، استفاده از یک عنصر عدم تعادل جریان (دستگاه 46).
می توان از یک سوئیچ سرعت جهت دار نصب شده بر روی شافت و یک تایمر برای تشخیص شروع با چرخش معکوس استفاده کرد.
در مقاله مرجع حفاظت موتورهای الکتریکی درباره 0 تا 100 روش های حفاظت از موتورهای ولتاژ متوسط و ولتاژ پایین صحبت کردیم، امیدواریم این توضیحات برای شما کاربردی بوده باشند.
 |
درباره نویسنده : آریا کاری
نظرتون درباره این مقاله چیه؟
ما رو راهنمایی کنید تا اون رو کامل تر کنیم و نواقصش رو رفع کنیم.
توی بخش دیدگاه ها منتظر پیشنهادهای فوق العاده شما هستیم.
ممنون از توضیحات جامع شما. خدا خیرتان بدهد
سلام
سپاس از لطف شما
موید باشید