
در دنیای کنترل حرکت و اتوماسیون، درک تفاوت استپ موتور و سروو موتور و انتخاب بین آنها از اهمیت بالایی برخوردار است و بر دقت و عملکرد برنامههای مختلف تأثیر میگذارد.
این مقایسه دقیق با هدف ارائه یک نمای کلی از تفاوت استپ موتور و سروو موتور برای مهندسان، علاقهمندان و متخصصان صنعت است.
با درک عملکرد و کاربردهای آنها، ما با مراحل مختلف موتورهای پلهای شروع میکنیم و اصول اساسی، انواع و اجزای آنها را بررسی میکنیم تا زمینه را برای یک تحلیل عمیق فراهم کنیم.
با انتقال به سروو موتورها، که بر روی حلقههای بازخورد پیوسته کار میکنند، انواع مختلف، اجزا و مکانیسمهای کنترل دینامیکی که آنها را متمایز میکند، بررسی میکنیم.
این مقاله تحلیل جامعی از تفاوت استپ موتور و سروو موتور در عوامل مهمی مانند سرعت، گشتاور، دقت و وضوح را توضیح میدهد و راهنمای دقیقی از تفاوت استپ موتور و سروو موتور را برای انتخاب موتور براساس نیازهای پروژه ارائه میدهد.
بخشهایی که به هزینه، پیچیدگی و ملاحظات خاص میپردازند، خوانندگان را در تصمیمگیری آگاهانه راهنمایی میکنند.
1# استپ موتور چیست؟
یک موتور پله ای از یک میدان مغناطیسی دوار برای تبدیل جریان الکتریکی به حرکت چرخشی استفاده میکند؛ اما چگالی بسیار بالاتری از قطبهای مغناطیسی دارد.
موتورهای پلهای یک چرخش کامل را به بخشهای مساوی زیادی تقسیم میکنند.
هنگامی که یک قطب مغناطیسی فعال میشود، شفت خروجی یک بخش یا یک “پله” را حرکت میدهد؛ بر این اساس است که به این موتورها استپر یا پلهای گفته میشود.
اگر قطبها به ترتیب در فرکانس بالا انرژی داده شوند، حرکت چرخشی صاف بهنظر میرسد.
معمولاً این نوع کنترل با کارتهای خروجی خاصی که میتوانند فرکانس خروجی بالای مورد نیاز را کنترل کنند، انجام میشود.
با افزایش چگالی قطعات، دقت موقعیت شفت خروجی نیز افزایش مییابد.
موتورهای پلهای معمولاً رمزگذار ندارند؛ زیرا قطعات بهطور دقیق تقسیم میشوند.
به یک موتور پلهای می توان دستور داد که تعداد درجه خاصی را با شمارش تعداد دفعاتی که خروجیها انرژی میگیرند، بچرخاند.
2# اجزای استپ موتور
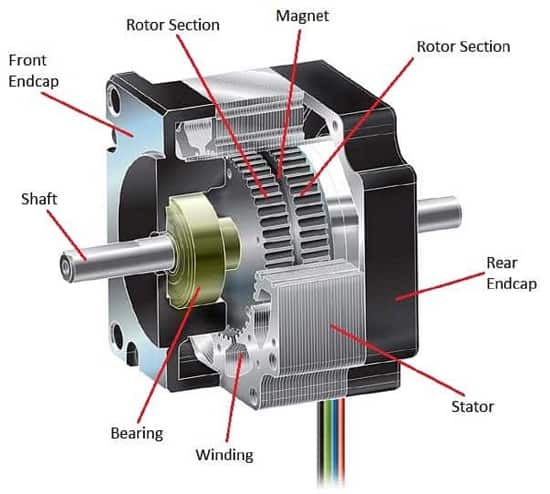
استپ موتور نوعی موتور الکتریکی است که پالسهای الکتریکی را به حرکات مکانیکی دقیق تبدیل میکند.
در اینجا برخی از اجزای متداول یک استپ موتور وجود دارد که برای هر کسی که با این موتورها کار میکند، مهم است.
- روتور: روتور قسمت متحرک استپ موتور است که بسته به نوع استپ موتور از یک آهنربای دائمی یا یک روتور دندانهدار تشکیل شده است.
روتور وظیفه تولید گشتاور و چرخش محور موتور را بر عهده دارد. - استاتور: استاتور جزء ثابت یک موتور پلهای است که شامل سیم پیچهایی است که میدانهای مغناطیسی لازم برای عملکرد موتور را تولید میکنند.
میدانهای مغناطیسی استاتور با میدانهای مغناطیسی روتور برای ایجاد حرکت تعامل دارند. - سیم پیچها: کویلها یا همان سیم پیچها جزء حیاتی استپ موتور هستند.
آنها در اطراف قطبهای استاتور پیچیده میشوند و جریان الکتریکی را که میدانهای مغناطیسی را ایجاد مینماید، حمل میکنند.
تعداد و آرایش سیم پیچها زاویه گام موتور و میزان دقت را تعیین میکند. - درایور: درایور موتور پلهای جزء دستگاه الکترونیکی موتور پلهای است که جریان و زمانبندی پالسهای الکتریکی ارسالشده به سیم پیچها را کنترل میکند و قدرت لازم و تقویت سیگنال را برای اطمینان از حرکت دقیق و کنترل شده موتور فراهم مینماید.
- کنترلر: کنترل کننده جزء مغزی یک سیستم استپ موتور است.
دستورات را از یک منبع خارجی مانند میکروکنترلر یا کامپیوتر دریافت میکند و سیگنالهای مربوطه را به درایور ارسال میکند.
کنترل کننده سرعت، جهت و ترتیب مراحل موتور را تعیین مینماید.
3# انواع استپ موتور

استپ موتور بهدلیل قابلیتهای کنترل دقیق و موقعیتیابی، کاربرد گستردهای در صنایع مختلف دارد.
سه نوع موتور پلهای اصلی وجود دارد که ویژگیهای آنها بهشرح زیر است:
- استپ موتور آهنربایی دائمی: موتورهای پلهای آهنربایی دائمی (PMSM) رایجترین نوع استپ موتور هستند.
آنها از یک روتور آهنربای دائمی و یک استاتور با دو یا چند سیم پیچ تشکیل شدهاند.
هنگامی که سیم پیچها در یک دنباله خاص انرژی میگیرند، روتور در مراحل گسسته حرکت میکند.
این نوع موتورها گشتاور بالا و دقت موقعیتی خوبی را ارائه میدهند که این ویژگی آنها را برای طیف گستردهای از کاربردها مناسب میکند. - استپ موتور رلوکتانس متغیر: استپ موتور رلوکتانس متغیر (VRSM) دارای یک روتور دندانهدار و یک استاتور با سیم پیچی میباشد.
روتور از یک ماده مغناطیسی ساخته شده است و سیم پیچهای استاتور برای ایجاد یک میدان مغناطیسی انرژی میگیرند.
همانطور که دندانههای روتور با قطبهای استاتور در یک راستا قرار میگیرند، روتور به صورت پلکانی حرکت میکند.
VRSM بهدلیل سادگی و هزینه کم خود شناخته میشود؛ اما ممکن است گشتاور کمتری نسبت به انواع دیگر داشته باشد. - استپ موتور هیبریدی: موتورهای پلهای هیبریدی انواعی از استپ موتور هستند که بهترین ویژگیهای هر دو موتور پلهای آهنربای دائم و رلوکتانس متغیر را ترکیب میکنند.
آنها یک روتور دندانهدار و یک استاتور با آهنرباهای دائمی و سیمپیچ دارند.
موتورهای هیبریدی گشتاور بالا، دقت موقعیت عالی و طیف وسیعی از وضوح گام را ارائه میدهند.
آنها معمولاً در برنامههایی که نیاز به کنترل دقیق و عملکرد بالا دارند، استفاده میشوند.
4# سروو موتور چیست؟
سروو موتور کاملاً شبیه یک موتور حرکت مداوم معمولی است.
چیزی که بهعنوان تفاوت اصلی استپ موتور و سروو موتور مطرح میباشد و سروو موتورها را از موتورهای معمولی متمایز میکند، حلقه بازخورد و سیستم درایو است.
سروو موتور دارای یک رمزگذار و کنترل کننده درایو میباشد که موقعیت شفت را به کنترل کننده درایو گزارش میدهد؛ بنابراین یک سیستم حلقه بسته ایجاد مینماید.
سیستم درایو قبل از اعمال جریان به موتور، ولتاژ ورودی را تقویت و فیلتر میکند.
بسته به ماهیت AC یا DC موتور، سرعت موتور توسط سیگنالهای موج سینوسی کنترل میشود.
درست مانند یک موتور AC معمولی، تنظیم فرکانس باعث تغییر سرعت موتور و مشابه یک موتور DC معمولی، تغییر ولتاژ باعث تغییر سرعت میشود.
با سروو موتور AC، درایو، سیگنال الکتریکی را از یک PLC یا کنترل کننده دیگر میپذیرد و سیستم درایو جریان را با فرکانس خاصی تا رسیدن به موقعیت موردنظر شفت موتور ارسال میکند.
5# اجزای سروو موتور
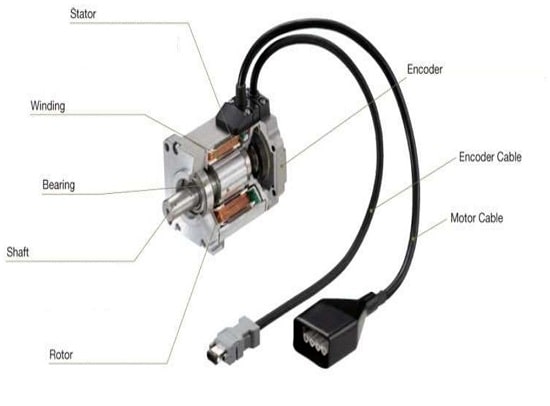
سروو موتور شامل چندین جزء کلیدی است که با هم کار میکنند تا حرکت دقیق و کنترل شدهای را ارائه دهند.
سروو موتور یک جزء حیاتی در کاربردهای مختلف صنعتی و رباتیک است. در اینجا برخی از اجزای متداول سروو موتور آورده شدهاند:
- روتور: روتور جزء متحرک سروو موتور است که از یک شفت و یک آهنربای دائمی تشکیل شده است و با وارد شدن جریان الکتریکی به موتور میچرخد.
- استاتور: استاتور جزء ثابت یک سروو موتور است که شامل سیم پیچهایی از سیم است که با عبور جریان الکتریکی از آنها، میدان مغناطیسی ایجاد میشود و میدان مغناطیسی با آهنربای روتور تعامل میکند و باعث چرخش آن میگردد.
- دستگاه بازخورد: دستگاه بازخورد جزء ضروری یک سروو موتور است و اطلاعاتی در مورد موقعیت، سرعت و جهت روتور در اختیار سیستم کنترل قرار میدهد.
این بازخورد به سیستم کنترل اجازه میدهد تا عملکرد موتور را تنظیم و موقعیت دقیق را تضمین کند. - سیستم کنترل: سیستم کنترل وظیفه نظارت و کنترل عملکرد سروو موتور را برعهده دارد.
بازخورد را از دستگاه بازخورد دریافت میکند و جریان الکتریکی را که به موتور عرضه میشود، تنظیم میکند.
این حلقه کنترل عملکرد دقیق موتور را تضمین میکند. - ترن دنده: یک قطار دنده اغلب در سروو موتورها برای افزایش گشتاور و کاهش سرعت استفاده میشود و شامل یک سری چرخ دنده است که نیرو را از موتور به شفت خروجی منتقل میکند.
ترن دنده، رابطه بین چرخش موتور و چرخش شفت خروجی را تعیین میکند.
6# انواع سروو موتور

با توجه به تفاوت استپ موتور و سروو موتور، سروو موتورها نیز در صنایع مختلف استفاده میشوند و کنترل حرکتی دقیق و قابل اعتمادی را ارائه میدهند.
درک انواع مختلف سروو موتورها میتواند بهشما کمک کند تا در انتخاب موتور مناسب برای کاربرد خاص خود تصمیمی آگاهانه بگیرید.
سروو موتورها انواع مختلفی دارند و کاربردهای آنها به شرح زیر است:
- سروو موتورهای DC: سروو موتورهای DC معمولاً انواع سروو موتورهایی هستند که به گشتاور و کنترل سرعت بالا نیاز دارند.
آنها بهدلیل زمان پاسخگویی سریع و عملکرد دینامیکی عالی شناخته شده هستند.
این موتورها از منبع تغذیه DC استفاده میکنند و برای رباتیک، ماشینهای CNC و سیستمهای اتوماسیون ایدهآل میباشند. - سروو موتورهای AC: سروو AC، نسبت گشتاور به اینرسی عالی را ارائه میکند و قادر به ارائه نرخهای شتاب و کاهش سرعت بالا است.
این نوع سروو موتورها معمولاً در ماشینهای بسته بندی، ماشینهای چاپ و ماشین آلات نساجی استفاده میشوند. - سروو موتورهای براشلس: سروو موتورهای براشلس بهدلیل عملکرد بدون نیاز به تعمیر و نگهداری و راندمان بالا شناخته شدهاند.
آنها بهجای برس از کموتاسیون الکترونیکی استفاده میکنند که این ویژگی نیاز به تعویض منظم برس را از بین میبرد. - سروو موتورهای خطی: سروو موتورهای خطی برای ارائه کنترل حرکت خطی بهجای حرکت چرخشی طراحی شدهاند.
این نوع سروو موتورها معمولاً در ماشینهای انتخاب و مکان، تولید نیمه هادیها و سیستمهای تصویربرداری پزشکی استفاده میشوند. - سروو موتورهای هیبریدی: سروو موتورهای هیبریدی مزایای موتورهای پلهای و سروو موتورها را با هم ترکیب میکنند.
آنها موقعیت دقیق مانند موتورهای سروو و سادگی کنترل را مانند موتورهای پلهای ارائه میدهند.
7# تفاوت بین استپ موتور و سروو موتور
وقتی نوبت به انتخاب موتور مناسب برای پروژه شما میرسد، مهم است که تفاوت استپ موتور و سروو موتور را درک کنید.
هر دو نوع موتور ویژگیهای منحصربهفرد خود را دارند و برای کاربردهای مختلف مناسب هستند.
1-7# سیستم بازخورد
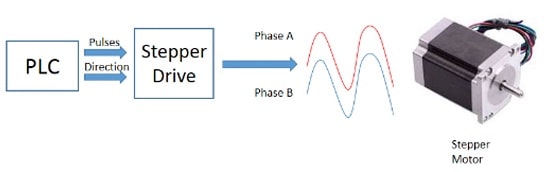
اولین تفاوت استپ موتور و سروو موتور این است که استپ موتور یک سیستم حلقه باز است به این معنی که هیچ بازخورد رمزگذار داخلی از موتور به درایو ندارد.
در این موتور کنترلکننده منطقی قابل برنامهریزی (PLC) پالسهای PWM/PTO و دستورات به درایو پلهای را همراه با سیگنال جهت، تولید میکند.
سپس درایو پلهای منبع تغذیه را به موتور میدهد و موتور شروع به چرخش در پلهها میکند و براساس تعداد پالسهای شما موتور بهصورت مرحلهای میچرخد.
موتور هیچ بازخوردی به درایو استپر نمیدهد.
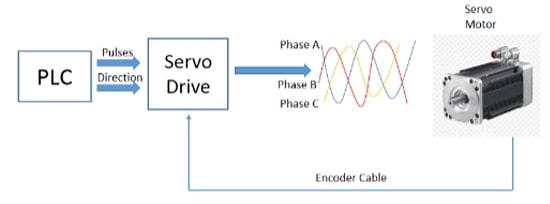
اما سروو موتور سیستم حلقه بسته است.
سروو موتور دارای یک رمزگذار داخلی است و بازخورد موقعیت فعلی را به درایو سروو میدهد، بههمین دلیل یک سیستم حلقه بسته است.
PLC پالسهای PWM/PTO و فرمانها را به درایو سروو همراه با سیگنال جهت تولید میکند.
سپس سروو درایو منبع تغذیه را به موتور میدهد و موتور شروع به چرخش میکند.
موتور با کابل انکودر به سروو درایو، بازخورد در حال اجرا میدهد و ما میتوانیم این بازخورد را از طریق کابلهای کنترل در PLC دریافت کنیم.
2-7# سرعت و گشتاور
از جمله تفاوت استپ موتور و سروو موتور میتوان به سرعت و گشتاور آنها اشاره کرد.
- سرعت و گشتاور استپ موتور:
- موتور پلهای سرعت کمتری نسبت به سروو موتور دارد، استپ موتور معمولی حداکثر سرعت 1500 RPM دارد.
- با افزایش سرعت موتور، گشتاور موتور کاهش مییابد.
- گشتاور بسیار خوبی در کاربردهای کم سرعت ارائه میدهد.
- استپ موتور در برنامههای کنترل گشتاور مفید نیست.
- سرعت و گشتاور سروو موتور:
- سروو موتور سرعت بالاتری نسبت به موتور پلهای دارد؛ اما در بازار تا 5000 دور در دقیقه درایو با سرعتهای متفاوت خواهید داشت.
- با افزایش سرعت موتور، گشتاور افزایش مییابد.
- گشتاور بسیار خوبی در کاربردهای با سرعت بالا میدهد.
- سروو موتور را میتوان در برنامههای کاربردی کنترل گشتاور استفاده کرد. (مثلاً ابزار سفت کردن مهره)
بررسی تفاوت استپ موتور سروو موتور در سرعت و گشتاور بهعنوان یک امر مهم در انتخاب موتور بر طبق نیاز عملیاتی شما مطرح است.
3-7# جریان الکتریکی
- جریان در استپر موتور:
- در استپر موتور جریان DC برای انرژی دادن به سیم پیچ مغناطیسی استفاده میشود.
- میتوان گشتاور را با افزایش جریان افزایش داد.
- برق کمتری مصرف میکند.
- جریان در سروو موتور:
- برای انرژی دادن به سیم پیچ مغناطیسی سروو موتور، جریان متناوب سه فاز استفاده میشود.
- گشتاور را میتوان با افزایش جریان افزایش داد.
- این موتور برق بیشتری از یک موتور پلهای مصرف میکند.
4-7# دقت و وضوح

استپ موتور کنترل دقیقی را که به زوایای گام ثابت و سیستمهای حلقه باز نسبت داده میشود، ارائه میدهد و این بهعنوان تفاوت استپ موتور و سروو موتور نقش اساسی در کارکرد دارد.
زاویه گام که وضوح موتور را تعیین میکند، نشاندهنده چرخش زاویهای در هر پالس الکتریکی است.
موتورهای پلهای معمولا دارای زوایای پلهای 0.9 تا 1.8 درجه هستند که در نتیجه 200 تا 400 پله در هر دور ایجاد میشود.
درحالیکه در سروو موتورها از طریق سیستمهای کنترل حلقه بسته و بازخورد، به دقت دست مییابند.
دقت این موتورها به وضوح دستگاههای بازخورد مانند رمزگذارها یا حل کنندهها بستگی دارد.
رمزگذارهای با وضوح بالا با ارائه هزاران یا حتی میلیونها تعداد در هر دور، موتورهای سروو را برای موقعیتیابی فوقالعاده دقیق و کنترل حرکت، قدرتمند میکنند.
بهعنوان مثال، یک سروو موتور مجهز به یک رمزگذار 1000000 شمارشی، به وضوح قابل توجه 0.0018 درجه در هر شمارش میرسد که از دقت یک موتور پلهای استاندارد، فراتر است.
5-7# تفاوت هزینه استپ موتور و سروو موتور
یکی دیگر از گزینههای تفاوت استپ موتور و سروو موتور هزینه است. سروو موتور و سروو درایو گرانتر از استپ موتور و استپ درایو هستند.
بنابراین برای کاربردهای کم هزینه موتور پلهای ارجحتر است.
8# کاربردهای استپ و سرو موتور

همانطور که پیشتر اشاره شد، موتورهای پلهای و سروو دو نوع موتور پرکاربرد در صنایع مختلف هستند.
درحالیکه هر دو نوع ویژگی ها و مزایای منحصر به فرد خود را دارند، در سناریوهای مختلف برتری دارند.
تفاوت استپ موتور و سروو موتور در کاربرد زیاد است و هر کدام کاربرد خاصی دارند که در ادامه آمده است:
- ماشینکاری CNC: موتورهای پلهای حرکات دقیقی را در ماشینآلات CNC انجام میدهند و از دقت در فرآیندهای برش و ماشینکاری اطمینان میدهند.
این در حالی است که موتورهای سروو از بازخورد بلادرنگ برای تنظیمات سریع و دقیق مسیر ابزار درایو سروو در کاربردهای ماشینکاری CNC استفاده میکنند. - چاپ سه بعدی: موتورهای پلهای جزء پرینترهای سه بعدی هستند و برای چاپهای دقیق و پیچیده مناسب میباشند.
- رباتیک: موتورهای پلهای دقت لازم را برای حرکت کنترلشده بازوها و اندامهای رباتیک فراهم میکنند؛ اما موتورهای سروو برای کارهایی مانند عملیات انتخاب و جابهجایی که نیاز به حرکات سریع و دقیق دارند، چابکی و پاسخگویی را ارائه میدهند.
- دقت مقرون به صرفه: سادگی و مقرونبهصرفه بودن موتورهای پلهای، آنها را برای کاربردهایی که دقت در آنها اهمیت دارد، مناسب میکند.
- گیمبالهای دوربین و هوافضا: موتورهای سروو، حرکات صاف و پایدار را در گیمبالهای دوربین تضمین میکنند و به کنترل سطوح و سیستمهای تثبیت کننده در هوافضا کمک مینمایند.
سخن آخر
هدف کلی سروو موتور و استپ موتور ارائه کنترل دقیق سرعت و موقعیتیابی است؛ اما تفاوت در طراحی این دو موتور، باعث ایجاد تفاوت استپ موتور و سروو موتور گشته است.
سروو موتور از نظر طراحی به یک موتور معمولی نزدیکتر است؛ اما دارای یک سیستم حلقه بسته و فناوری کنترل کننده پیشرفته است.
یک موتور پلهای از نظر طراحی متفاوتترین است و برای دستیابی به موقعیتیابی نیازی به سیستم حلقه بسته ندارد؛ اگرچه بسیاری از سیستمهای پلهای از اضافه شدن یک رمزگذار بهره میبرند.
در نتیجه کنترل حرکت، تفاوت استپ موتور و سروو موتور، کاربردها و عوامل منحصربهفرد آنها را برای انتخاب بهینه نشان میدهد.
برخی از کاربردهای این موتورها بهدلیل اهداف مشابه با یکدیگر همپوشانی دارند؛ اما زمانی که به سرعتهای بالاتر و گشتاور بالاتری نیاز است، سروو موتور انتخاب بهتری است.
هنگامی که سرعتهای آهستهتر و موقعیتیابی با دقت بالاتر مورد نیاز است، موتور پلهای انتخاب بهتری است.
مهندسان هنگام انتخاب بین آنها باید زمینههای تفاوت استپ موتور و سروو موتور مانند سرعت، گشتاور، دقت و هزینه را متعادل کنند.
چه با اولویت دادن به دقت در بودجه و چه سرمایهگذاری در سازگاری، فرآیند تصمیمگیری مستلزم درک قابلیتهای هر موتور است.
استپ و سروو موتورها همچنان به نوآوری در اتوماسیون و رباتیک در صنایع ادامه میدهند و مهندسان را به انتخاب آگاهانه برای کارایی و دقت در پروژههای خود راهنمایی میکنند.
 |
درباره نویسنده : معصومه آذری
نظرتون درباره این مقاله چیه؟
ما رو راهنمایی کنید تا اون رو کامل تر کنیم و نواقصش رو رفع کنیم.
توی بخش دیدگاه ها منتظر پیشنهادهای فوق العاده شما هستیم.
عالی
سلام همراه گرامی
ممنون از لطف شما