
اولین چیزی که در ساخت یک موتور الکتریکی نیاز دارید، فرمول های سیم پیچی موتور است.
موتورها پرکاربردترین بخش هر دستگاهی هستند.
از ساعتهای ظریف و کوچک مچی گرفته تا دستگاههای بزرگ صنعتی در کارخانه ها، همگی به نوعی از موتور الکتریکی در ساختار داخلی خود بهره میبرند.
بسته به کاربرد مورد نظر شما برای موتور، گزینههایی برای انتخاب در پیش رو خواهید داشت.
در ادامه این مقاله همراه ما باشید تا با انواع فرمول هایی که در سیم پیچی موتور به آن ها نیاز پیدا خواهید کرد آشنا شوید.
1# موتور الکتریکی چیست؟
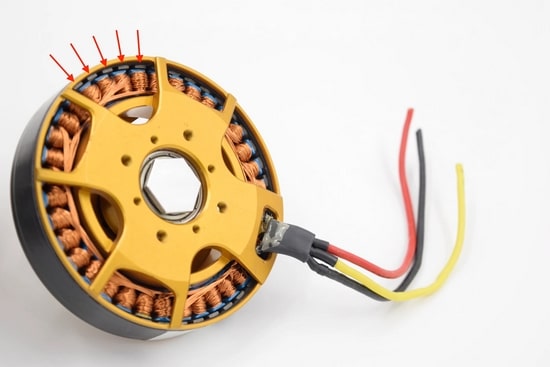
موتور الکتریکی دستگاهی است که انرژی الکتریکی را به مکانیکی تبدیل می کند.
اکثر موتورها بر اساس اصل برهمکنش بین جریان الکتریکی و میدان مغناطیسی درون سیم پیچ کار میکنند که این اتفاق باعث چرخش شفت موتور میشود.
موتورها دو نوع منبع تغذیه دارند:
- DC (Direct Current): شامل باتری ها
- AC (Alternating Current): شامل اینورترها، شبکه های برق و ژنراتورها

در بخش های بعد مهم ترین فرمول های سیم پیچی موتور (Motor Winding) را بیان خواهیم کرد که
به کمک آن ها میتوانید پارامترهای موتور الکتریکی را محاسبه کنید.
2# فرمول محاسبه تعداد قطبهای موتور
برای محاسبه تعداد قطبهای یک الکتروموتور، از فرمول زیر استفاده میشود.
P = 120f/Ns
که در آن:
- P تعداد قطبها است.
- F فرکانس منبع تغذیه برحسب هرتز است.
- Ns سرعت سنکرون موتور برحسب دور بر دقیق یا RPM است.
فرص کنید یک موتور دارای فرکانس منبع تغذیه 50هرتز و سرعت سنکرون 1500 دور بر دقیقه باشد، با استفاده از فرمول بالا تعداد قطبهای آن به روش زیر محاسبه میشود:
P = 120 * 50 / 1500
P = 6000 / 1500 = 4
بنابراین، این موتور یک موتور چهار قطبی است.
1-2# نکات تکمیلی
فرکانس منبع تغذیه در بیشتر کشورها 50هرتز و در برخی از کشورهای دنیا مانند آمریکا 60هرتز است.
سرعت سنکرون موتورهای مورد استفاده در صنعت معمولا یکی از مقادیر استانداردی مانند 750، 1000، 1500 یا 3000 دور بر دقیقه برای فرکانس 50 هرتز است.
برای فرکانس 60 هرتز هم این مقادیر به ترتیب 900، 1200، 1800 یا 3600 دور بر دقیقه میباشند.
که به احتمال زیاد به مرور زمان با استفاده از فرمول های سیم پیچی موتور و فرمول ذکر شده در این بخش این موارد را به خاطر خواهید سپرد که
برای هر سرعت و فرکانس مشخص چه تعداد قطب موتور مورد نیاز است.
فرکانس 50 هرتز:
- 3000 RPM موتور دو قطبی
- 1500 RPM موتور چهار قطبی
- 1000 RPM موتور شش قطبی
- 750 RPM موتور هشت قطبی
فرکانس 60 هرتز:
- 3600 RPM موتور دو قطبی
- 1800 RPM موتور چهار قطبی
- 1200 RPM موتور شش قطبی
- 900 RPM موتور هشت قطبی
3# فرمول محاسبه گام قطبی
یکی از مواردی که در هنگام سیم پیچی موتورهای الکتریکی باید محاسبه شود و در نظر داشته باشیم، گام قطبی است.
گام قطبی به سطحی از استاتور گفته میشود که توسط یک قطب N یا S محاصره میگردد.
به بیان سادهتر گام قطبی به تعداد شیارهایی گفته میشود که توسط یک قطب اشغال میشود.
گام قطبی را با yp و تعداد شیارها را با z و تعداد قطب ها را با 2P نشان میدهند و به این ترتیب محاسبه گام قطبی به صورت زیر میباشد.
yp = z/2P
برای مثال اگر یک موتور 36 شیار و 4 قطب داشته باشد، گام قطبی آن برابر است با:
yp = 36 / 4 = 9
4# گام سیم بندی یا گام کلاف
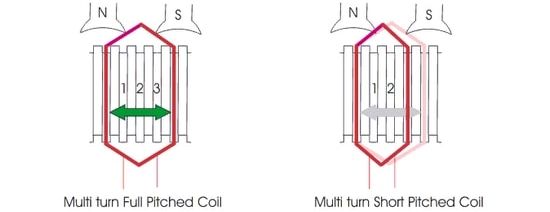
گام کلاف یا سیم بندی به فاصله شیارها بین بازوها یا پیچکهای یک کلاف گفته میشود و با yz نمایش داده میشود.
اگر yp با yz مساوی باشد، گام سیم بندی کامل است.
اگر yz کوچکتر از yp باشد، گام سیم بندی کوتاه یا کسری است.
میزان کسری گام در گام کوتاه یک سوم گام قطبی و حداقل یک شیار است.
برای گام کامل گام سیم بندی برابر با گام قطبی می باشد.
برای گام سیم بندی در گام کوتاه ضریب کوتاهی گام یک سوم را در گام قطبی ضرب میکنیم و
حداکثر کسری گام به دست میآید، سپس گام قطبی را از عدد حداکثر کوتاهی گام کم میکنیم تا گام سیم بندی در گام کوتاه مشخص شود.
1-4# حل مثال عددی
گام سیم بندی یک موتور 24 شیار 2 قطبی را با گام کامل و گام کوتاه محاسبه میکنیم:
ابتدا گام قطبی را حساب میکنیم که در دو حالت یکسان است و برابر است با:
yp = z/2p
6 = 2*yp = 24 / 2
حداکثر کسری گام برابر است با یک سوم ضرب گام قطبی یعنی یک سوم عدد 6 که میشود مقدار 2.
yz = گام قطبی – حداکثر کسری گام
yz = 6 – 2 = 4
اعداد به دست آمده را باید با عدد یک جمع کنیم.
علت این کار است که گام سیم بندی محاسبه شده در هر دو حالت مشخصکننده فاصله بین شیارها میباشد؛ یعنی در گام کامل، گام کلاف 1 به 7 میباشد و
بین شیار 1 تا 7 ما 6 شیار فاصله داریم و در گام کوتاه گام سیم بندی 1 به 5 میباشد؛ یعنی بین شیارهایی که دو بازو یا پیچک کلاف قرار گرفته است، 4 شیار فاصله است.
معمولا طراحی موتور با گام کوتاه به خاطر کاهش هارمونیک ها و بهبود کارایی موتور است.
برای فهم بهتر این موضوع یک مثال بازاری میزنیم.
الکتروموتور چهار قطب در حالت گام کامل شش کلاف دارد و در حالت گام کوتاه دوازده کلاف دارد.
5# فرمول محاسبه سیم پیچی موتور برای زاویه الکتریکی شیار
زاویه الکتریکی شیارهای الکتروموتور (معروف به زاویه شیار) که با alpha e z نشان داده میشود، به زاویهای اشاره دارد که میان شیارهای مجاور در استاتور یا روتور یک ماشین الکتریکی وجود دارند.
این زاویه در تحلیل توزیع میدان مغناطیسی و طراحی بهینه موتورهای الکتریکی نقش مهمی دارد.
زاویه الکتریکی شیارها را میتوان از طریق رابطه زیر محاسبه کرد:
alpha e z = 360p/z
که در آن:
- alpha e z زاویه الکتریکی شیارها است.
- P تعداد جفت قطبهای موتور است.
- Z تعداد کل شیارهای استاتور یا روتور است.
1-5# حل مثال عددی
فرض کنید یک موتور با 6 جفت قطب (یعنی 12 قطب) و 36 شیار داشته باشیم.
زاویه الکتریکی شیارها به صورت زیر میباشد.
alpha e z = 360 * 6 / 36
alpha e z = 60
این عدد به این معنا است که هر شیار نسبت به شیار بعدی یک زاویه الکتریکی 60 درجه دارد.
2-5# اهمیت زاویه الکتریکی شیارها در محاسبات سیم پیچی موتورها
زاویه الکتریکی شیارها نقش حیاتی در توزیع متقارن جریانها و تولید میدان مغناطیسی در موتورهای الکتریکی دارد.
توزیع مناسب شیارها میتواند منجر به کاهش هارمونیکهای ناخواسته، کاهش نویز و ارتعاش و بهبود بازده کلی موتور شود.
به بیان دیگر میتوان گفت که زاویه الکتریکی شیارهای الکتروموتور نشاندهنده زاویه بین شیارهای مجاور در یک موتور الکتریکی است و
از طریق رابطهای که به تعداد جفت قطبها و تعداد شیارها بستگی دارد محاسبه میشود.
این زاویه در بهینهسازی طراحی و عملکرد موتورهای الکتریکی اهمیت فراوانی دارد و
برای پیدا کردن شیارهای ورودی برق فازها در فرمول های سیم پیچی الکتروموتور بعدی لازم است.
6# فرمول محاسبه تعداد پیچک های یک کلاف
برای به دست آوردن تعداد پیچکهای یک کلاف در استاتور یا روتور یک موتور الکتریکی، از فرمول زیر استفاده میشود که به تعداد شیارها، تعداد قطبها و تعداد کلافها بستگی دارد.
q = Z / 2.p.m
که در آن:
- q تعداد پیچکهای هر کلاف است.
- Z تعداد کل شیارها است.
- 2p تعداد جفت قطبهای موتور است.
- m تعداد فازها (معمولاً 3 برای موتورهای سهفاز) است.
برای مثال در یک موتور با 6 جفت قطب (12 قطبی) و 36 شیار و 3 فاز تعداد پیچکهای هر کلاف بهصورت زیر محاسبه میشود:
q = 36 / 2.6.3 = 1
این عدد به این معنا است که هر کلاف شامل یک پیچک است.
1-6# اهمیت تعداد پیچک ها در فرمول های سیم پیچی موتور
تعداد پیچکهای هر کلاف بر روی توزیع جریان و تولید میدان مغناطیسی در موتور تأثیر میگذارد.
طراحی صحیح و انتخاب مناسب تعداد پیچکها میتواند به بهبود کارایی و عملکرد موتور کمک کند.
طبق محاسبات قبلی که گام سیم بندی را به دست آوردیم با محاسبه تعداد پیچک ها میتوان متوجه شد که هر کلاف چند پیچک دارد و ترسیم دیاگرام را برای ما آسان میکند.
7# محاسبه شیارهای ورودی هر فاز
برای پیدا کردن شیارهای ورودی هر فاز ابتدا باید زاویه الکتریکی را محاسبه کرد که همان alpha e z میباشد که توضیحات آن قبلتر داده شده است.
شیار شماره 1 را به عنوان ورودی اول یا U قرار میدهیم.
سر و ته های هر فاز به ترتیب برای هر فاز همنام به صورت U و X برای فاز اول، V و Y برای فاز دوم و W و Z برای فاز سوم در نظر گرفته میشود.
البته این علائم برای نظام قدیم بوده و در نظام جدید با علائم U1 و U2 برای فاز اول، V1 و V2 برای فاز دوم و W1 و W2 برای فاز سوم نامگذاری میشود.
برای ورودیهای برق نیز در نظام قدیم از حروف R, S, T استفاده میشد که با حروف L1, L2, L3 در نظام جدید جایگزین شدهاند.
شیار 1 برای R در نظر گرفته میشود و برای ورودی دوم باید از رابطه زیر استفاده کرد:
S = 1 + 120/alpha e z
و برای ورودی سوم نیز داریم که:
T = 1 + 240/alpha e z
1-7# حل مثال عددی
برای یک الکتروموتور 36 شیار و 4 قطب، ورودی فازها را محاسبه کنید.
alpha e z = 360 × p/z
20 = alpha e z = 360 × 2÷36
زاویه الکتریکی هر شیار 20درجه محاسبه شد و در نتیجه ورودی ها را محاسبه میکنیم.
R شیار اول است.
برای محاسبه S داریم:
S = 1 + (120/20) = 7
برای محاسبه T داریم:
T = 1 + (240/20) = 13
که در نهایت ورودیهای برق به ترتیب U=1، V=7 و W=13 میباشند.
8# مشخص کردن نوع سربندی الکتروموتور
یکی از اموری که برای سیم پیچی موتورها ضروری است، تعیین نوع سربندی موتور است.
برای فهمیدن نوع اتصال سربندی الکتروموتورهای معمولی باید G را محاسبه کرد تعداد کلافهای موجود در یک فاز و سپس با مقایسه این عدد با جفت قطب یا قطب (2P یا P) نوع سربندی مشخص میشود.
محاسبه G دو روش دارد، روش اول تجربی است با شمردن تعداد کلاف ها و تقسیم آن بر سه.
برای مثال موتور ما شش کلاف دارد که از تقسیم آن بر سه مقدار G میشود دو.
روش دوم استفاده از فرمول محاسبه سیمبندی الکتروموتور است که از رابطه زیر برای آن استفاده میشود.
G = (t.z)/(2q.m)
در رابطه فوق t تعداد طبقات سیم پیچی است که در موتورهای دوطبقه مهم است؛ ولی در موتورهای یک طبقه میتوان آن را حذف کرد.
- z تعداد شیارهای استاتور است.
- q تعداد پیچکهای هر کلاف است.
- m تعداد فازها می باشد.
1-8# حل مثال عددی
سربندی الکتروموتور 36 شیار 4 قطب به چه صورت است؟
ابتدا q یا همان تعداد پیچکهای استاتور را حساب میکنیم.
q = z/2pm
3 = q = 36 / (4×3)
یعنی هر کلاف 3 پیچک دارد.
حال میتوان عدد G را به دست آورد.
G = (t.z)/(2q.m)
2 = G = (1×36)/ (2×3×3)
پس از محاسبه، عدد بهدستآمده را با قطب یا جفت قطب مقایسه میکنیم اگر G با برابر با p بود سربندی اتصال نزدیک است؛ یعنی ته به سر و
اگر G برابر با 2p بود اتصال دور است؛ یعنی ته به ته و سر به سر.
از این روابط میتوان نتیجه گرفت در حالت گام کامل و گام کوتاه اتصال سربندی برعکس هم هستند.
در موتور 36 شیار 4 قطب گام کامل ما تعداد 6 کلاف داریم و سربندی با محاسبات فوق اتصال نزدیک است؛ یعنی ته به سر ولی برای همین موتور در حالت گام کوتاه ما تعداد 12 کلاف داریم و اگر محاسبات را انجام دهیم متوجه میشویم که سربندی در این حالت به صورت اتصال دور یا ته به ته میباشد.
 |
درباره نویسنده : مرتضی جداری
نظرتون درباره این مقاله چیه؟
ما رو راهنمایی کنید تا اون رو کامل تر کنیم و نواقصش رو رفع کنیم.
توی بخش دیدگاه ها منتظر پیشنهادهای فوق العاده شما هستیم.
با سلام و عرض ادب واحترام .
سیم پیچی الکتروموتور ها حدود ۱۳فرمول دارد در صورت امکان برای من ارسال کنید به ترتیب…
آموزش تون تکمیل نبوده ولی خوب بود.
ممنونم از لطف شما محمد عیدی زاده ممسنی
سلام و وقت بخیر جناب عیدی زاده ممسنی
ممنون از توجه و مطالعه دقیقتون.
در رابطه با فرمولهای سیمپیچی الکتروموتور لازم هست یک نکته رو روشن کنیم: در عمل سیمپیچی موتور، همیشه ۱۳ فرمول مشخص و واحد وجود نداره که برای همه موتورها یکسان باشه، چون محاسبات بسته به تعداد شیار، قطب، فاز و نوع موتور متغیره.
با این حال در این مقاله، مجموعهای از فرمولهای کاربردی و پرکاربرد سیمپیچی معرفی شده که میتونه راهنمای خوبی برای محاسبات باشه، مثل محاسبه تعداد قطبها، گام قطبی، گام سیمبندی، زاویه الکتریکی شیارها، تعداد پیچکها و شیارهای ورودی هر فاز و …
در عمل چیزی که مهمه درک روش محاسبه و کاربرد هر رابطه هست، نه حفظ کردن تعداد فرمول.
اگر نیاز دارید، میتونیم همون فرمولهای مقاله را بهصورت مرتب و خلاصه براتون لیست کنیم تا راحتتر استفاده کنید.
باز هم ممنون از نظر شما و خوشحالیم که آموزشها براتون مفید بوده.
موفق باشید
عالی وکلمه به کلمه توضیح وآموزشجامه کاملی دادین ممنونم باکمال تشکر از زحمات شما
سلام همراه گرامی
از این که لطف کردید و بازخورد گرمتون رو با ما به اشتراک گذاشتید، بسیار سپاسگزاریم.
خوشحالیم که مطالب براتون مفید بوده
موفق باشید
بادرود واحترام خدمت استاد جداری
باعث افتخار است ایشان در رسته سیمپیچی وبازپیچی الکتروموتور ودیگر مقالات همیشه صاحب قدم وصاحب نظر بودن و هستند
امیدوارم همیشه شاد و پیروز باشید 🏆
سلام همراه محترم وقت بخیر
سپاس از لطف و توجه شما
افتخار ماست که نظرات شما شنیده میشه و همراهی شما انرژیبخش است.
موفق باشید
سلام
از زحمتی که برای نگارش و انتشار این مقاله کشیدید ممنونم فعلآ یه نگاه اجمالی کردم،انشالله تو فرصتهای بعدی نظرم رو عرض میکنم ،فقط الان این سؤال به نظرم رسید که «تو بعضی الکتروموتورها ایراد روتور موجب سوختن سیم پیچ ها می شه و این عیب بعد از تعویض سیم پیچی معلوم میشه » آیا روشی برای عیب یابی روتور ،پیش از سیم پیچی الکتروموتور می شناسید؟
سلام جناب موسوی وقت بخیر
سپاس از توجه و همراهی شما
موضوعات تخصصی خودتون رو میتونید از طریق لینک زیر در فروم نماتک مطرح بفرمایید تا کارشناسانمون راهنماییتون کنند.
https://katibeha.com/
موفق باشید
سلام استاد جداری مقاله عالی بود شما همش عالی هستید استاد…
سلام همراه گرامی
سپاس از لطف و همراهی شما
سلام مهندس خدا پاداش کارهای خوبتان را بدهد
فقط وقتی توضیحات را می خواندم بسیار عالی بود فقط اگه یک شکل در کنار توضیحات بود عالی میشد مثلا روتور من مبتدی شکلش را دیده ام ولی نمی دانم کدام روتور هست
سلام آقای خالقی
سپاس بابت لطف و همراهیتون
خوشحالیم که محتوا براتون مفید بوده
این پیشنهاد شما برای بهبود مقاله به تیم نویسنده و محتوا ارجاع داده شد.
سلام واقعا کیفیت مقاله شما برای من که یک ماه پیش اومده تو این رشته عالی جالب این که مثال زدید برای هر کدام مرسی انشالله سر بلند باشی
سلام همراه محترم
از محبت و لطف شما بسیار متشکریم و خرسندیم که این مطلب برای رسیدن شما به اهدافتون کاربردی واقع شده
موفق و منصور باشید
با سلام بسیار عالی بود سپاسگزارم
سلام همراه گرامی
سپاس از لطف و محبت شما
بسیار عالی ممنون
سلام همراه گرامی
از محبت شما متشکریم
لطفا در مورد دوبل مثلث یا پارالل مثلث توضیحاتی ارائه بشه
سلام همراه گرامی
سپاس از زمانی که برای مطالعه این مطلب صرف کردید
پیشنهاد خوب شما رو به مهندس برای تکمیل مطالب این مقاله انتقال خواهیم داد
موید باشید
استاد در مورد محاسبه قطر هادی پیچها لطفا توضیح دهید.
سلام همراه گرامی
سپاس از حضور شما.
پیشنهاد خوبتون رو برای تکمیل مقاله حتما به جناب مهندس انتقال خواهیم داد
موید باشید
سلام روش محاسبه سری و موازی الکتروموتورها رو در این بسته آموزش میدین؟
سلام جناب مهندس یزدی وقت بخیر
برای اطلاع از موارد آموزش داده شده در این بسته لطف بفرمایید فایل pdf جزییات عناوین آموزشی رو دانلود و مطالعه کنید تا از تمامی سرفصل ها به صورت ریز مطلع باشید.
لینک صفحه محصول: https://namatek.com/Course/%D8%A8%D8%B3%D8%AA%D9%87-%D8%B3%DB%8C%D9%85-%D9%BE%DB%8C%DA%86%DB%8C-%D8%A7%D9%84%DA%A9%D8%AA%D8%B1%D9%88%D9%85%D9%88%D8%AA%D9%88%D8%B1/
موفق باشید.
تعداد پیچک ها رو اشتباه زدی جای ۶ ۱۲ قطب کامل نوشتی بعد ۱ دراوردی با اینکه اشتباه زدی
سلام همراه گرامی
ممنون از اینکه برای بهبود این مقاله با دقت نظر خودتون به ما کمک کردید، بله این یک اشتباه تایپی بوده که در زمان وارد کردن مقاله به سایت اتفاق افتاده بود و الان هم تصحیح شد
موفق باشید
سلام خسته نباشید اموزش سربندی موتورها الکتریکی بیشتری بزاریدوفرمولهاان رابصورت ساده بنویسید
سلام خدمت شما دوست عزیز
خیلی ممنون از همراهی شما با سایت نماتک.
پیشنهاد شمارو به تیم نویسنده ارجاع میدیم.
موفق و موید باشید.
سلام مهندس
موتوری که بین فازهایش یازده اهم داره…چندکیلوواته وآمپرش چقدره……
سلام همراه گرامی
با عرض پوزش ما پشتیبان سایت آموزشی هستیم و اطلاعات فنی درباره موردی که سوال فرمودید نداریم.
لطفا برای درج سوالات تخصصی از فضای فروم نماتک استفاده بفرمایید که عزیزانی که با سابقه و دانش مرتبط در این حوزه هستند پاسخگوی شما باشند.
موفق باشید