انواع زیادی از الکتروموتور ها وجود دارند که هرکدام بنابر ویژگی ها و کاربرد خود در قسمتی از صنایع مختلف استفاده می شود.
درواقع الکتروموتور دستگاهی است که انرژی الکتریکی دریافت کرده و آن را به انرژی مکانیکی تبدیل می کند.
همین عملکرد باعث به حرکت درآمدن چرخ بسیاری از صنایع کشور شده است.
به دلیل اهمیت الکتروموتورها در زندگی روزمره، امروز قصد داریم درباره انواع الکتروموتور توضیحاتی ارائه دهیم.
با ما همراه باشید.
انواع الکتروموتور (Electromotor)
الکتروموتورها را می توان به سه نوع اصلی تقسیم بندی کرد:
- الکتروموتور جریان مستقیم (Direct Current) یا DC
- الکتروموتور جریان متناوب (Alternating Current) یا AC
- الکتروموتورهای خاص
هریک از موارد ذکرشده بر اساس ویژگی هایشان زیرمجموعه های مجزایی دارند که
در ادامه به توضیح هریک از آن ها می پردازیم.

1# انواع الکتروموتور DC
الکتروموتورهای DC جزء ابتدایی ترین انواع الکتروموتور هستند.
همان گونه که از اسمشان مشخص است تنها با جریان مستقیم (DC) کار می کنند.
این نوع الکتروموتور آرمیچر آهنربایی و کموتاتور دارد که
باعث تغییر مسیر جریان به طور منظم و ایجاد میدان مغناطیسی می شود.
در ادامه به چند مورد از انواع الکتروموتور DC اشاره می کنیم:
1) الکتروموتور DC سری (Series)
این نوع الکتروموتور هنگام راه اندازی به گشتاور بالایی نیاز دارد؛
بنابراین قابل استفاده در صنایعی است که امکان فراهم سازی گشتاورهای بالا را دارند.
می توان انواع الکتروموتور موجود در جرثقیل های سنگین و آسانسورهای هیدرولیکی را برای الکترموتور DC سری مثال زد.
لقب این نوع از موتورهای الکتریکی، الکتروموتورهای کششی است؛
زیرا در ساختار وسایل نقلیه عمومی مانند تراموا و مترو به کار می رود.

2) الکتروموتور DC شانت (Shunt)
اجزای داخلی این نوع از الکتروموتورها زیر فشار سنگین آسیب می بینند؛
بنابراین نمی توان آن ها را زیر فشارهای سنگین راه اندازی کرد.
این نوع در دور نامی خود دارای گشتاور حرکتی حداکثر است؛
از این رو در ساختار دمنده های صنعتی و هواکش ها کاربرد دارد.

3) الکتروموتور DC کمپوند (Compound)
اکتروموتورهای کمپوند خصوصیات مشترک الکتروموتورهای شانت و سری را دارند.

الکتروموتور کمپوند به دو زیرمجموعه تقسیم می شود:
- الکتروموتور کمپوند نقصانی: در برخی از جایگاه ها تنها به بار ثابت کوچک تر از بار نامی نیاز است؛
بنابراین در این موارد از الکتروموتورهای کمپوند نقصانی استفاده می شود؛
مانند آزمایشگاه های تولید بار ثابت با سرعت تقریبا ثابت.

- الکتروموتورهای کمپوند اضافی: این نوع الکتروموتور در مواردی که الکتروموتور سری نیاز است، کاربرد دارد؛
با این تفاوت که الکتروموتور کمپوند اضافی از دور گرفتن شدید و غیرقابل کنترل جلوگیری می کند.
از همین رو در صنایعی همچون دستگاه های تراشکاری کاربرد دارد.

2# انواع الکتروموتور AC
با رواج استفاده از جریان متناوب (AC)، صنایع بسیاری از این جریان و درنتیجه الکتروموتورهای متناوب بهره می برند.
انواع الکتروموتور AC از قسمت ثابتی به نام استاتور و قسمت متحرکی به نام روتور تشکیل شده اند که
میدان مغناطیسی به وجود آمده باعث تغییر جهت و حرکت روتور می شود.
معمولا انواع الکتروموتور متناوب، ساختار ساده تری دارند؛
بنابراین تعمیر و اصول نگهداری از آن ها نسبت به سایر مدل های الکتروموتور آسان تر است.
از این نوع در بسیاری از صنایع و مصارف خانگی استفاده می شود.
1-2# الکتروموتور AC سنکرون (Synchronous)
این نوع الکتروموتور، روتور و استاتور سیم پیچی شده دارد.
روتور توسط جریان مستقیم و استاتور توسط جریان متناوب تغذیه و باعث به وجود آمدن میدان چرخشی می شوند.
روتور با سرعت سنکرون ایجاد شده توسط میدان دوار به حرکت در می آید.

2-2# انواع الکتروموتور AC آسنکرون (Asynchronous)
این نوع الکتروموتور نیز مانند سایر موتورها قسمت ثابت (استاتور) و قسمت متحرک (روتور) دارد.
روتور این دستگاه توسط میدان مغناطیسی تولیدشده توسط استاتور به حرکت در می آید.

انواع الکتروموتور آسنکرون عبارت اند از:
- الکتروموتور آسنکرون قفس سنجابی: نام این الکتروموتور به دلیل تشابه بسیار بالای روتور آن به شکل قفس سنجاب ها است.
روتور این الکتروموتور به صورت استوانه با میله های مسی و آلومینیومی است،
میله ها به دو صورت میله های گرد و میله های مستطیلی به شکل مورب کنار هم قرار می گیرند.
دلیل مورب قرار گرفتن میله ها، استفاده از هم پوشانی میدان استاتور و روتور برای جلوگیری از قفل شدن و ایجاد لرزش در هنگام راه اندازی است.
- الکتروموتور آسنکرون روتور سیم پیچی شده: برای رفع نقطه ضعف الکتروموتورهای قفس سنجابی مقاومت پایین، از الکتروموتورهای سیم پیچی استفاده می شود.
به این صورت که به جای استفاده از میله ها از روتور سیم پیچی شده استفاده می شود که
در لحظه راه اندازی مانع بالا رفتن جریان و گشتاور می شود.
همچنین در این نوع الکتروموتور با قرار دادن مقاومت در مسیر سیم پیچ ها می توان کنترل جریان الکتروموتور را به دست گرفت.

3# انواع الکتروموتور های خاص
از انواع الکتروموتور AC و DC در جایگاه هایی که نیاز به تبدیل انرژی پیوسته وجود دارد استفاده می کنند؛
اما در برخی از موارد و در کاربردهای خاص نیاز به تولید انرژی دائمی نیست و
الکتروموتور تنها برای کاربردهای ویژه و مخصوص فعالیت انجام می دهد.
به این نوع از الکتروموتورها، الکتروموتور خاص گفته می شود.
بر اساس کارکرد و طراحی، این نوع الکتروموتورها را به چند دسته تقسیم بندی کرده اند.
1-3# الکتروموتور هیسترزیس (Hysteresis)
از انواع الکتروموتور هیسترزیس برای تولید گشتاور بهره می برند.
روتور الکتروموتور هیسترزیس از نوع استوانه صاف بدون هیچ برجستگی و فرورفتگی و حتی بدون هیچ سیم پیچی است.
استاتور این نوع با یک خازن دائمی به کار گرفته می شود تا از تلفات موتور جلوگیری کند.

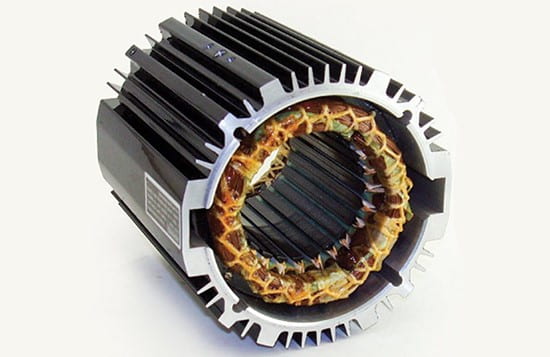
2-3# الکتروموتور پله ای (Stepper)
این نوع الکتروموتور مانند انواع الکتروموتور های موجود روتور و استاتور دارد؛
با این تفاوت که روتور این الکتروموتور دارای دندانه هایی به شکل چرخ دنده است.
روتور به صورت پله ای حرکت می کند و یک دور را معمولا در گام های کوچک (1.8 درجه) می پیماید؛
بنابراین یک دور را در عرض 200 پله طی می کند.
البته این الکتروموتورها بنابر کاربرد و محلی که استفاده می شوند می توانند گام های مختلفی داشته باشند.
سرعت و مکان این نوع الکتروموتورها به وسیله سیستم های پیشرفته تحت کنترل است.
در زمینه روباتیک بیشتر از انواع الکتروموتور پله ای استفاده می کنند.
3-3# الکتروموتور سروو (Servo)
این الکتروموتور در یک مدار بسته مورد استفاده قرار می گیرد.
از سروو موتورها معمولا برای کنترل سرعت، موقعیت، گشتاور و شتاب استفاده می کنند.
این الکتروموتور برخلاف انواع الکتروموتور ذکر شده یک قطعه الکتریکی مجزا با سرعت و دقت بالا و یک سنسور برای فیدبک دادن دارد.

4-3# انواع الکتروموتور یونیورسال (Universal)
این نوع الکتروموتور قابلیت راه اندازی با جریان AC و DC را دارد.
در این نوع موتورها قطب ها چرخشی نیستند و سیم پیچ روتور با سیم پیج قطب ها به صورت سری بسته شده اند.
این نوع الکتروموتورها سرعت بسیار بالا و وزن کم و فشرده ای دارند.
به همین علت انواع الکتروموتور یونیورسال بیشتر در لوازم خانگی مورد استفاده قرار می گیرند.
5-3# انواع الکتروموتور رلوکتانسی (Reluctance)
استاتور این نوع الکتروموتور شیارهایی دارد که سیم پیچی ها روی آن ها قرار می گیرند.
روتور نیز شکل خاصی دارد که در هنگام چرخش به دلیل وجود شیارهای استاتور، در آن فاصله هوایی متغیر ایجاد می شود.
در انواع الکتروموتور رلوکتانسی فاصله هوایی متغیر باعث ایجاد مقاومت مغناطیسی متغیر نیز می شود؛
درواقع در نقاطی که فاصله هوایی بیشتر است، رلوکتانس بیشتر و در مکان هایی که فاصله هوایی کم است رلوکتانس نیز کم می شود.

6-3# الکتروموتور ریپالسیونی (Repulsion)
این نوع الکتروموتورها بر پایه دافعه مغناطیسی کار می کنند.
به صورتی که سیم پیچ استاتورها به جریان متناوب وصل شده و روتور نیز مانند انواع الکتروموتور جریان مستقیم است.
تنها تفاوت بین الکتروموتورهای ریپالسیونی با DC، وجود جاروبک های (brush) اتصال کوتاه شده در محل برخورد جاروبک با کموتاتورها است.

7-3# الکتروموتور دالاندر (Dahlander)
این الکتروموتورها به گونه ای سیم پیچی می شوند که با تغییر در آن ها می توان دو نوع سرعت مختلف را تولید کرد.

به دلیل همین ویژگی استثنایی، از انواع الکتروموتور دالاندر در مدارها به جای اینورترها که قیمت بالایی دارند، استفاده می شود.
 |
درباره نویسنده : تیم نماتک
نظرتون درباره این مقاله چیه؟
ما رو راهنمایی کنید تا اون رو کامل تر کنیم و نواقصش رو رفع کنیم.
توی بخش دیدگاه ها منتظر پیشنهادهای فوق العاده شما هستیم.